Configuration – Yaskawa SGDB User Manual
Page 254
USING THE DIGITAL OPERATOR
5.2.1 Ratings and Specifications cont.
244
Servomotor
Model
SGMG-
Gear
Inertia
× 10
−4
Kg·m
2
(× 10
−3
lb·in·s
2
)
Gear
Servomotor
Servomotor
Model
SGMG-
Gear
Inertia
× 10
−4
Kg·m
2
(× 10
−3
lb·in·s
2
)
Max.
Speed
min
−1
Rated
Speed
min
−1
Instanta-
neous
Peak
Torque/Ef-
ficiency
N·m/%
(lb·in/%)
Rated
Torque/Ef-
ficiency
N·m/%
(lb·in/%)
Gear Ra-
tio
Rated
Torque
N·m
(lb·in)
Rated
Speed
min
−1
Output
kW
-75AjAjBR
7.5
1500
48.0
(425)
1/11
422/80
(3735/80)
1039/80
(9196/80)
136
272
65.0
(57.5)
-75AjAjCR
(
)
1/21
807/80
(7143/80)
1989/80
(17605/80)
71
142
79.0
(69.9
)
-75AjAj7R
1/29
1117/80
(9887/80)
2754/80
(24376/80)
51
103
91.0
(80.5)
-1AAjAjBR
11
70.0
(620)
1/11
615/80
(5443/80)
1548/80
(13701/80)
136
182
90.0
(79.6)
-1AAjAjCR
(
)
1/21
1176/80
(10408/80)
2950/80
(26110/80)
71
95
95.0
(84.1
)
-1AAjAj7R
1/29
1627/80
(14400/80)
4067/80
(35996/80)
51
69
238.0
(210.6)
Note Output torque and motor speed produce the following trends in efficiency. Values in
the table are at the rated motor speed.
Output torque
Motor speed
Efficiency
Efficiency
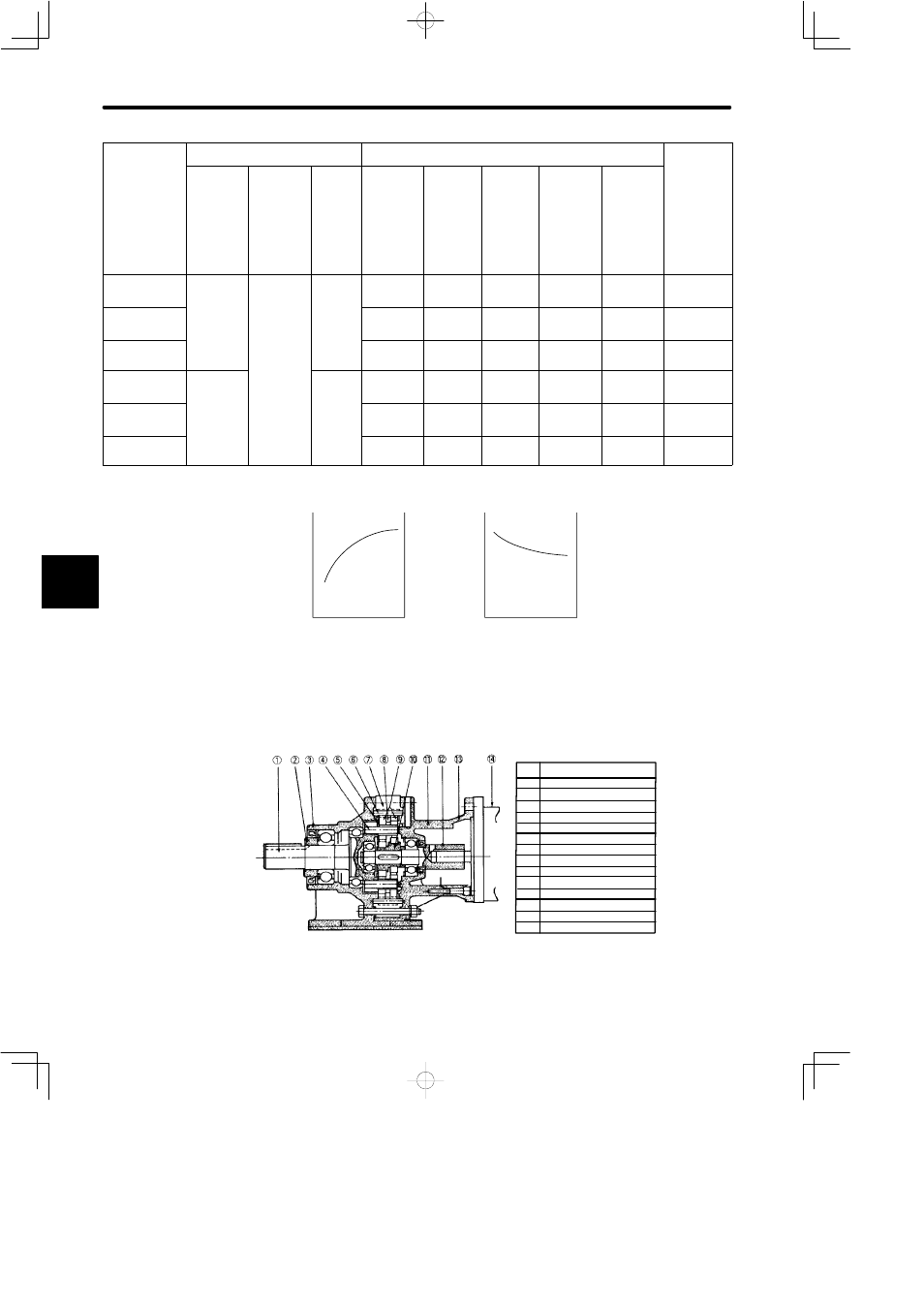
Configuration
The following configuration accurately and efficiently transmits Servomotor power.
A gear (Cyclo) is used in combination with the internal planetary gear mechanism of the Servo-
motor.
No.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
Part Name
Low-speed shaft
Collar
External cover
Internal pin
Internal roller
External pin
Frame
Ring
Curved plate
Eccentric bearing
Internal cover
High-speed shaft
Adapter plate
Motor
5