Input /p-con 1cn-41 – Yaskawa SGDB User Manual
Page 79
3.2 Setting Parameters According to Host Controller
67
• Using /P-CON Signal:
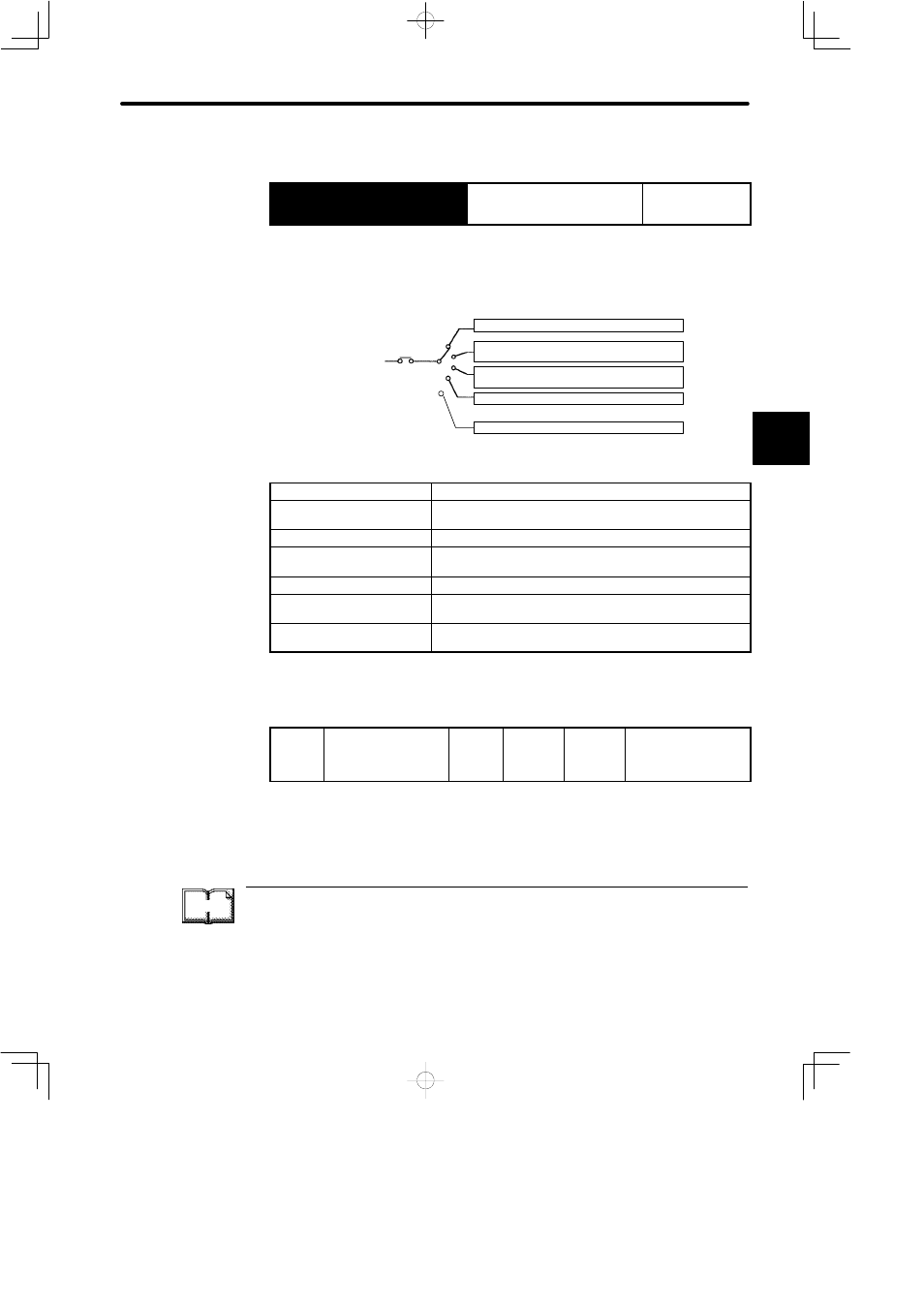
→ Input /P-CON 1CN-41
Proportional Control, etc.
For Speed Control
and Position
Control
The function of input signal /P-CON changes with Cn-2B setting.
SGDB SERVOPACK
Switching between P control and PI control
Switching between zero-clamp enabled mode and
zero-clamp prohibited mode
Switching the control mode
Cn-2B
Switching between INHIBIT enabled mode and INHIBIT
prohibited mode
Changing the direction of rotation
/P-CON
Cn-2B Setting
Meaning of /P-CON Signal
0, 1
Switching between proportional (P) control and
proportional/integral (PI) control
2
(Not used)
3, 4, 5, 6
Changing the direction of rotation during contact input speed
control
7, 8, 9
Switching the control mode
10
Switching between zero-clamp enabled and zero-clamp
prohibited modes
11
Switching between INHIBIT enabled and INHIBIT prohibited
modes
Adjust the speed reference gain using the following parameter.
Cn-03
VREFGN Speed
Reference Gain
Unit:
(
min
−1
)/
V
Setting
Range:
10 to
2000
For Speed Control
Only
TERMS
Zero-clamp function
This function is used for a system in which the host controller does not form a position loop.
In this case, the stopping position may shift even if a speed reference is set to 0. If the zero-
clamp function is turned ON, a position loop is internally formed so that the stopping position
is firmly “clamped.”
3