Yaskawa SGDB User Manual
Page 296
SERVO SELECTION AND DATA SHEETS
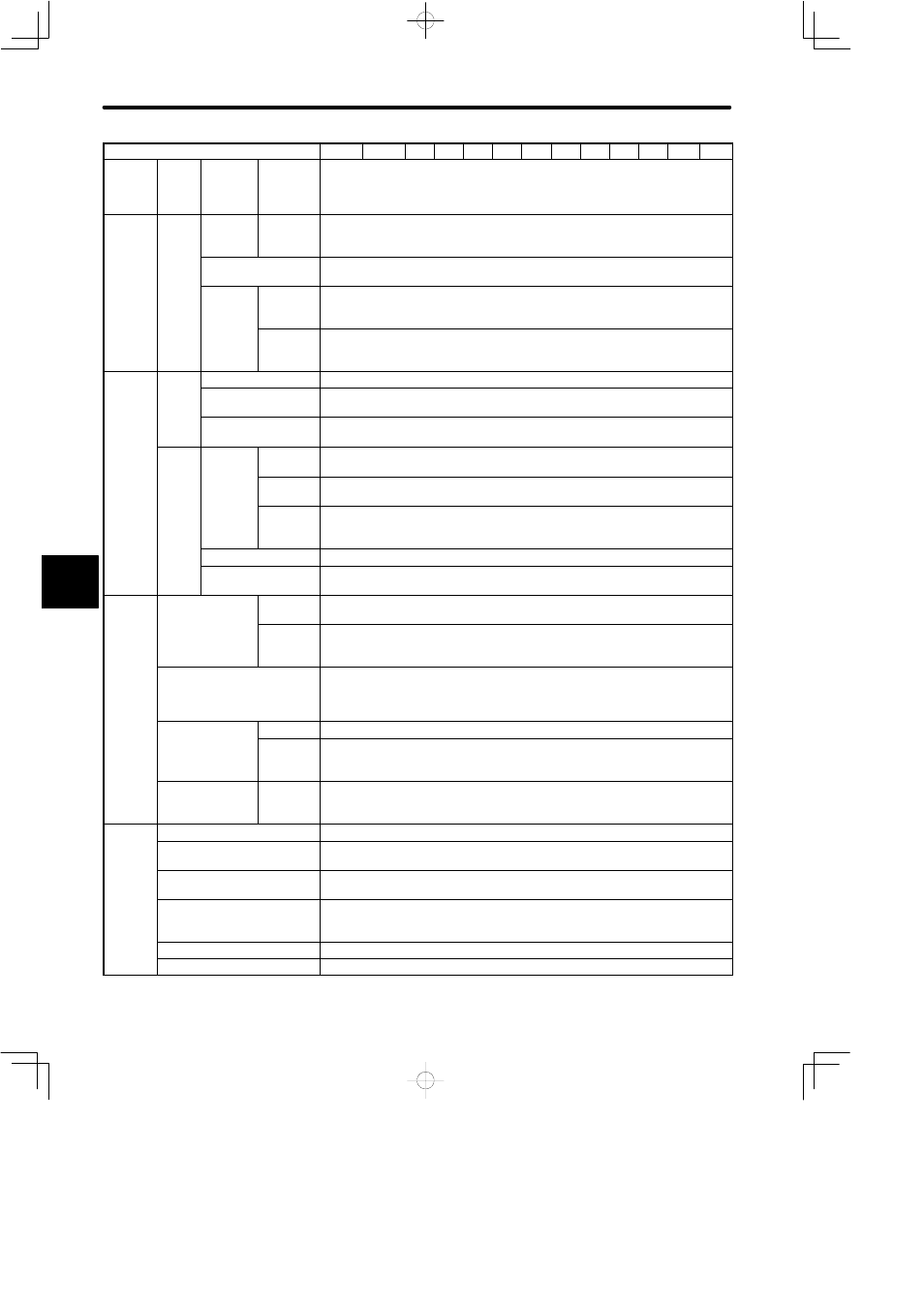
5.3.2 Ratings and Specifications cont.
286
SERVOPACK SGDB-
03
05
07
10
15
20
30
44
50
60
75
1A
1E
Speed/
Torque
Control
Mode
Input
Signal
Torque
Refer-
ence
Input Im-
pedance
Approx. 30 kΩ
Speed/
Torque
Control
M d
Input
Signal
Torque
Refer-
ence
Circuit
Time
Constant
Approx. 47 μs
Mode
Built-in Reference
Power Supply
¦
12 V, ¦30 mA
Contact
Speed
Refer-
Rotation
Direction
Selection
Uses P control signal
ence
Speed
Selection
Forward/reverse rotation current control signals are used (1st to 3rd speed
selection).
When both signals are OFF, the motor stops or enters another control mode.
Position
C
l
Per-
f
Bias Setting
0 to 450 r/min (setting resolution: 1 r/min)
Control
Mode
form-
ance
Feed-forward Com-
pensation
0 to 100% (setting resolution: 1%)
Position Complete
Width Setting
0 to 250 reference units (setting resolution: 1 reference unit)
Input
Signal
Refer-
ence
P l
Type
SIGN + PULSE train, 90_ phase difference 2-phase pulse (phase A + phase B),
or CCW + CW pulse train
g
Pulse
Pulse
Buffer
Line driver (+5 V level), open collector (+5 V or +12 V level)
Pulse
Frequen-
cy
Max. 450/200 kpps (line driver/open collector)
Control Signal
CLEAR (input pulse form identical to reference pulse)
Built-in Open Collec-
tor Power Supply*
5
+12 V (with built-in 1 kΩ resistor)
I/O Sig-
nals
Position Output
Output
Form
Phases A, B and C: Line driver output
Phase S: Line driver output (only when 12-bit absolute encoder is used)
a s
Frequen-
cy Divid-
ing Ratio
(16 to N)/N (N: Number of encoder pulses)
Sequence Input
Servo ON, P control (or forward/reverse rotation in contact input speed control
mode), forward rotation prohibited (P-OT), reverse rotation prohibited (N-OT),
alarm reset, forward rotation current limit, and reverse rotation current limit (or
contact input speed control)
Sequence Output
Servo alarm, 3-bit alarm codes
q
p
Any 3 of
those
signals
Positioning complete (speed coincidence), TGON, servo ready, current limit,
brake release, overload warning, overload detected
Analog Monitor
Output
Any 2 of
those
signals
Speed: 2 V/1000 r/min or 1 V/1000 r/min
Torque: 2 V/rated torque
Error: 0.05 V/reference unit or 0.05 V/100 reference units
Built-in
F
Dynamic Brake (DB)
Activated at main power OFF, servo alarm, servo OFF or overtravel
Func-
tions
Regenerative Processing
Incorporated. For 60 to 1A types, external regenerative resistor must be
mounted.
Overtravel (OT) Prevention
Motor is stopped by dynamic brake, decelerates to a stop, or coasts to a stop
when P-OT or N-OT is activated.
Protection
Overcurrent, overload, regenerative error, main circuit voltage error, heat sink
overheat, power open phase, overflow, overspeed, encoder error, encoder
disconnected, overrun, CPU error, parameter error
LED Display
POWER, ALARM, CHARGE
Analog Monitor (5CN)
Same analog monitor signal as 1CN is available.
5