Yaskawa SGDB User Manual
Page 570
LIST OF USER CONSTANTS
564
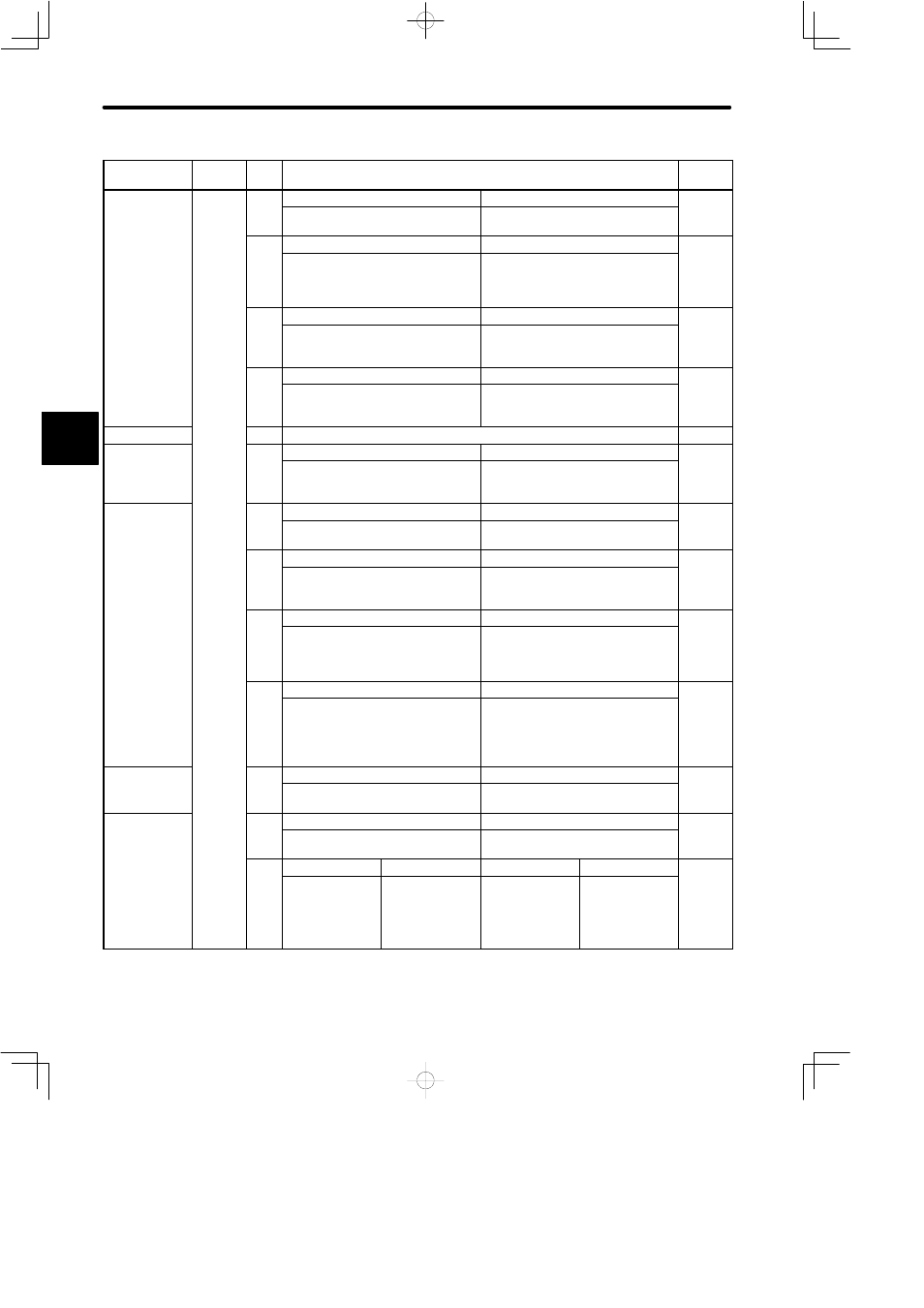
List of Parameters (Memory Switch Setting) (1)
Param-
eter No.
Bit
No.
Setting
Factory
Setting
Input signal
bl /di bl
Cn-01
0
0
1
0
p
g
enable/disable
Uses servo ON input (/S-ON).
Does not use servo ON input (/S-
ON). Servo is always ON.
1
0
1
0
Uses SEN signal input (SEN) when
absolute encoder is used.
Does not use SEN signal input
(SEN) when absolute encoder is
used. SERVOPACK automatically
treats signal voltage as high level.
2
0
1
0
Uses forward rotation prohibited in-
put (P-OT).
Does not use forward rotation pro-
hibited input (P-OT). Forward rota-
tion is always possible.
3
0
1
0
Uses reverse rotation prohibited in-
put (N-OT).
Does not use reverse rotation pro-
hibited input (N-OT). Reverse rota-
tion is always possible.
Reserved
4
Reserved : Setting = 0 (do not change the setting)
0
Operation per-
f
d
5
0
1
0
p
p
formed at re-
covery from
power loss
Resets servo alarm status at power
recovery from its momentary power
loss.
Remains in servo alarm status at
power recovery from momentary
power loss.
Sequence
l
i
6
0
1
0
q
selection at
alarm condition
Stops the motor by applying dynamic
brake (DB)at base block.
Makes the motor coast to a stop at
base block.
7
0
1
*1
At base block, stops the motor by
applying dynamic brake (DB)and
then release DB.
At base block, stops the motor by
applying dynamic brake (DB)but
does not release DB.
8
0
1
0
Stops the motor according to bit 6
setting when overtravel is detected
(P-OT, N-OT).
Decelerates the motor to a stop by
applying the torque specified in
Cn-06 when overtravel is detected
(P-OT, N-OT).
9
0
1
0
When overtravel is detected (P-OT,
N-OT), decelerates the motor to a
stop by applying the torque specified
in Cn-06 and then performs Servo
OFF.
When overtravel is detected (P-OT,
N-OT), decelerates the motor to a
stop by applying the torque specified
in Cn-06 and then turns the zero-
clamp.
Process selec-
i
f S
A
0
1
0
tion for Servo
OFF
Clears error pulse at Servo OFF
Does not clear error pulse at Servo
OFF
Mode switch
l
i
B
0
1
0
selection
Uses mode switch function. Follows
Cn-01 bits D, C
Does not use mode switch function.
D⋅C 0⋅0
0⋅1
1⋅0
1⋅1
0⋅0
Uses internal
torque reference
as a condition
(Level setting :
Cn-0C)
Uses speed ref-
erence as a
condition
(Level setting :
Cn-0D)
Uses accelera-
tion as a condi-
tion
(Level setting :
Cn-0E)
Uses error pulse
as a condition
(Level setting :
Cn-0E)
C