Yaskawa SGDB User Manual
Page 242
USING THE DIGITAL OPERATOR
5.1.1 Selecting a Servomotor cont.
232
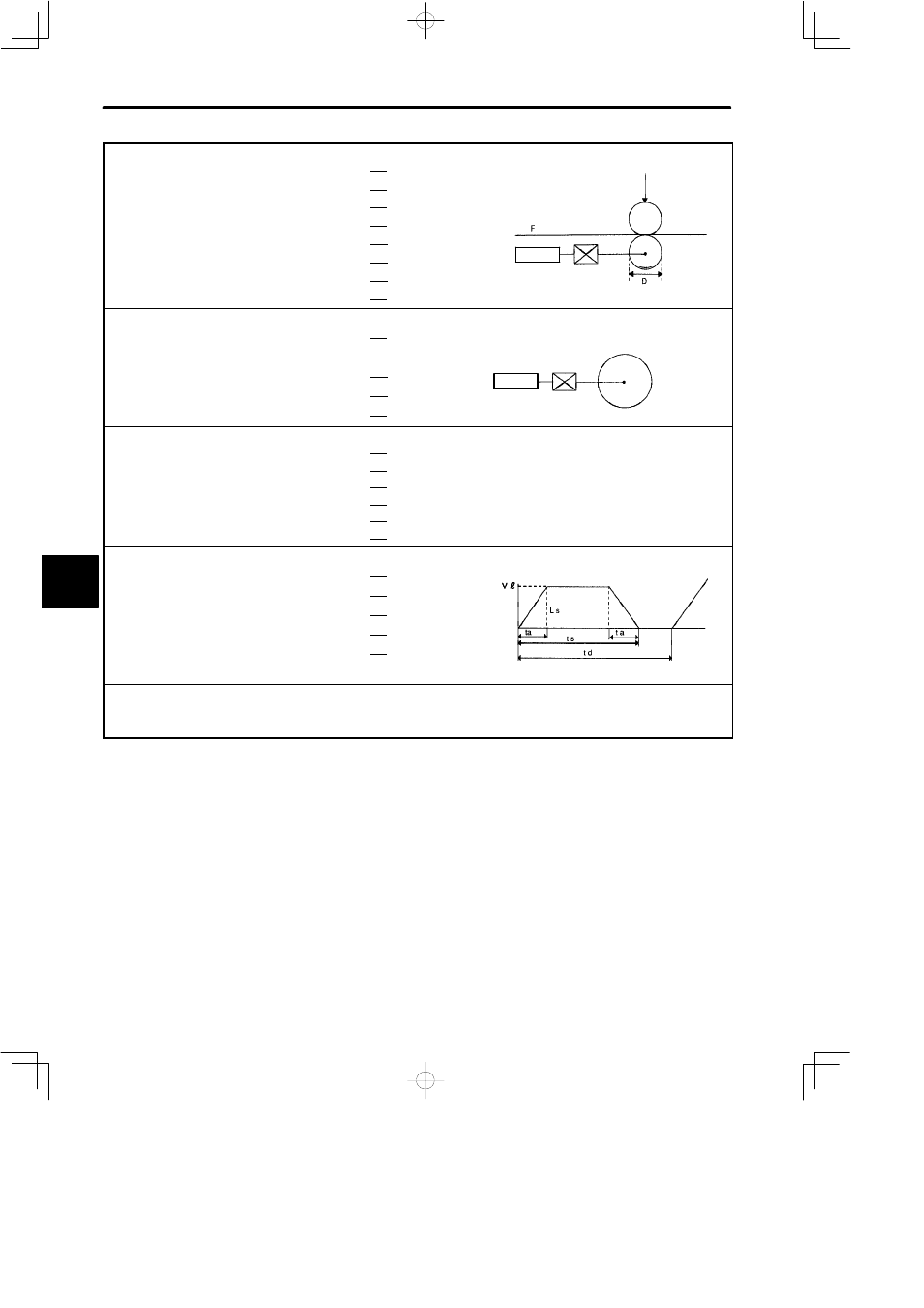
Roll Feeder
P
f
Load J
Jℓ
kg¡cm
2
(lb¡in
2
.)
Press force
Tension
F
kg (lb)
Press force
P
kg (lb)
Roller
Roller diameter
D
mm (in.)
Roller
Coefficient of friction
µ
Motor
Overall efficiency
η
G
li
Motor
Jℓ
Gear ratio
R (= Nm/Nl)
Gear+coupling
GD
2
g
Gear+coupling
Jg
kg¡cm
2
(lb¡in
2
.)
GD
2
g
Rotor
Load J
Jℓ
kg¡cm
2
(lb¡in
2
.)
Load torque
Tℓ
kg¡cm
2
(lb¡in
2
.)
T ℓ
Overall efficiency
η
Motor
Gear ratio
R (= Nm/Nl)
Gear+coupling
Motor
Jℓ
Gear+coupling
Jg
kg¡cm
2
(lb¡in
2
.)
Gear+coupling
Jg
Others
Load J
Jℓ
kg¡cm
2
(lb¡in
2
.)
Load torque
Tℓ
kg¡cm
2
(lb¡in
2
.)
Motor speed
Nm
min
−1
DUTY
td
s
Positioning time
ts
s
Accel/decel time
ta
s
Duty cycle
DUTY
td
s
Positioning distance
Ls
mm (in.)
Moving member speed
Vℓ
m/min
Positioning time
ts
s
Accel/decel time
ta
s
Enter either Vℓ or ts. If both are entered, specify priority.
Operating environment
D
Operating temperature
D
Other
*1
J (inertia) of Table W (load weight) and J (inertia) of the motor are automatically calcu-
lated by the servomotor sizing software.
*2
Gear ratio R = Nm/N
ℓ
= motor-speed/load-speed
*3
Gear+coupling J g: J of gear or coupling
This is J of the joint (including a gear) between the motor and the load (machine).
5
- Tag Generator (30 pages)
- MP3300iec (82 pages)
- 1000 Hz High Frequency (18 pages)
- 1000 Series (7 pages)
- PS-A10LB (39 pages)
- iQpump Micro User Manual (300 pages)
- 1000 Series Drive Option - Digital Input (30 pages)
- 1000 Series Drive Option - CANopen (39 pages)
- 1000 Series Drive Option - Analog Monitor (27 pages)
- 1000 Series Drive Option - CANopen Technical Manual (37 pages)
- 1000 Series Drive Option - CC-Link (38 pages)
- 1000 Series Drive Option - CC-Link Technical Manual (36 pages)
- 1000 Series Drive Option - DeviceNet (37 pages)
- 1000 Series Drive Option - DeviceNet Technical Manual (81 pages)
- 1000 Series Drive Option - MECHATROLINK-II (32 pages)
- 1000 Series Drive Option - Digital Output (31 pages)
- 1000 Series Drive Option - MECHATROLINK-II Technical Manual (41 pages)
- 1000 Series Drive Option - Profibus-DP (35 pages)
- AC Drive 1000-Series Option PG-RT3 Motor (36 pages)
- Z1000U HVAC MATRIX Drive Quick Start (378 pages)
- 1000 Series Operator Mounting Kit NEMA Type 4X (20 pages)
- 1000 Series Drive Option - Profibus-DP Technical Manual (44 pages)
- CopyUnitManager (38 pages)
- 1000 Series Option - JVOP-182 Remote LED (58 pages)
- 1000 Series Option - PG-X3 Line Driver (31 pages)
- SI-EN3 Technical Manual (68 pages)
- JVOP-181 (22 pages)
- JVOP-181 USB Copy Unit (2 pages)
- SI-EN3 (54 pages)
- SI-ET3 (49 pages)
- MECHATROLINK-III (35 pages)
- EtherNet/IP (50 pages)
- SI-EM3 (51 pages)
- 1000-Series Option PG-E3 Motor Encoder Feedback (33 pages)
- 1000-Series Option SI-EP3 PROFINET (56 pages)
- PROFINET (62 pages)
- AC Drive 1000-Series Option PG-RT3 Motor (45 pages)
- SI-EP3 PROFINET Technical Manual (53 pages)
- A1000 Drive Option - BACnet MS/TP (48 pages)
- 120 Series I/O Modules (308 pages)
- A1000 12-Pulse (92 pages)
- A1000 Drive Software Technical Manual (16 pages)
- A1000 Quick Start (2 pages)
- JUNMA Series AC SERVOMOTOR (1 page)
- A1000 Option DI-101 120 Vac Digital Input Option (24 pages)