Yaskawa SGDB User Manual
Page 121
3.4 Setting Stop Mode
109
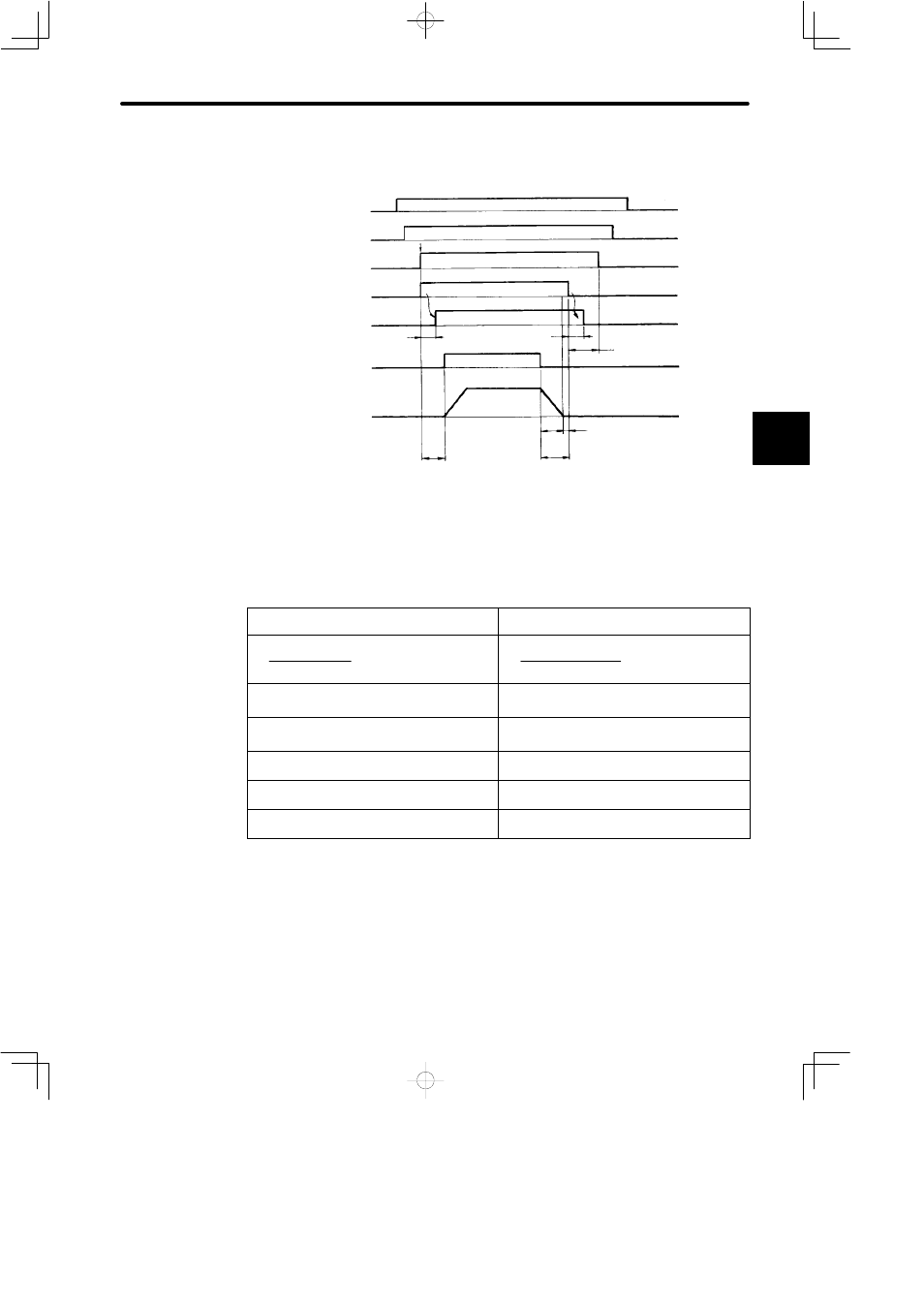
When using the holding brake, turn ON and OFF the brake with the following timing be-
cause a delay occurs. The brake interlock is useful for adjusting the timing.
OFF
OFF
OFF
OFF
SERVOPACK
control power supply
SERVOPACK
main power supply
Servo ON
Holding brake power supply
Brake contact part
(Lining)
Speed reference
Open
Motor rotation
ON
ON
ON
ON
*1
*2
*4
*5
*6
*3
200ms or more
200ms to 1.0 s
0V
t
0
+t
1
t
1
t
0
*2
* 1 Apply the holding brake at the same time as the Servo ON.
* 2 The mechanical contact takes 180 ms max. to be opened when the brake is turned ON and 100 ms max. to be closed when turned
OFF.
* 3 Allow 200 ms or more between the moment when the brake is turned ON and when the speed reference is input.
* 4
t
o
indicates the motor stopping time. The table below shows the fomula.
* 5 Do not turn OFF the brake power supply before the motor stops. Normally,
t
o
+
t
1
is approx. 1 to 2 seconds.
* 6 In 0.2 to 1.0 seconds after turning OFF the brake power supply, turn OFF the servo ON.
Using SI Units
Using Gravitational Units
(s)
(J + J ) × N
M
L
M
(T + T )
P
L
t =
o
(s)
(GD + GD ) × N
M
L
M
375 × (T + T )
P
L
t =
o
2
2
J : Rotor moment of inertia (kg¡m
2
)
M
GD : Motor GD (kg¡m
2
)
M
2
2
J : Load moment of inertia (kg¡m
2
)
L
GD : Load GD (kg¡m
2
)
L
2
2
N : Motor speed (min
−1
)
M
N : Motor speed (min
−1
)
M
T : Motor deceleration torque (N¡m)
P
T : Motor deceleration torque (kg¡m)
P
T : Load torque (N¡m)
L
T : Load torque (kg¡m)
L
NOTE
The built-in brake in servomotor with brake is a de-energization operation type, which is
used for holding purposes only and cannot be used for braking purposes. Use the holding
brake only to retain a stopped motor. Brake torque is more than about 120% of the rated
motor torque.
3