4 supplementary information on test run – Yaskawa SGDB User Manual
Page 59
2.4 Conducting a Test Run
47
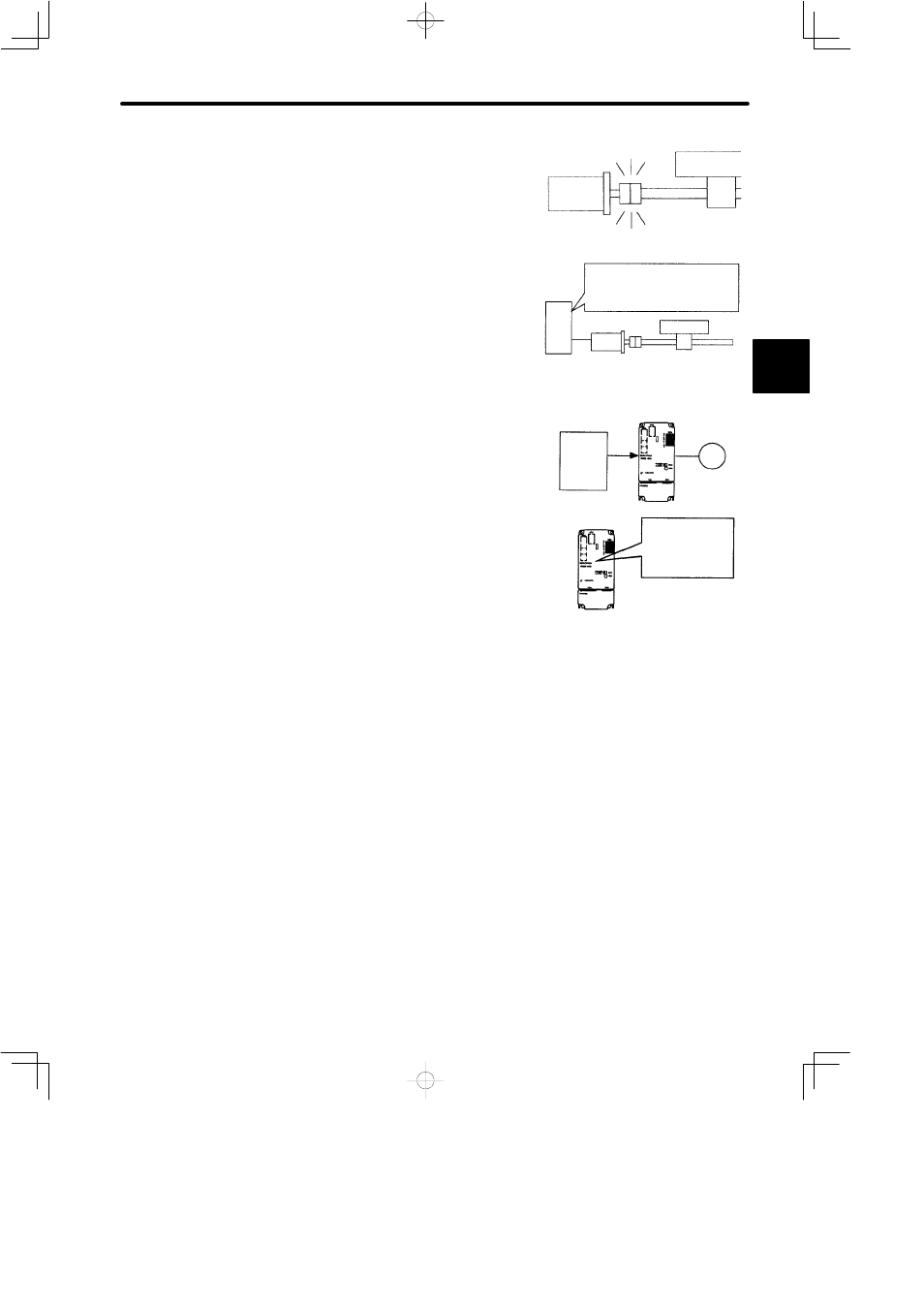
2. Connect the servomotor to the machine.
Refer to Section 2.2.4 Installing the Servo-
motor.
3. Perform autotuning.
Tune the SERVOPACK according to the ma-
chine characteristics. Refer to Section 4.2.3
Autotuning.
4. Operate by reference input.
As in step 1 (conducting a test run for motor
without load), perform (8) Operate by refer-
ence input on page 44. Perform tuning
associated with the host controller.
5. Set parameters and record the settings.
Set parameters as necessary. Record all the
parameter settings for maintenance purposes.
This is all that is required to conduct the test run.
Normally, the machine may cause much friction because of an insufficient running-in pe-
riod. After a test run is complete, perform adequate running-in.
2.4.4 Supplementary Information on Test Run
In the following cases, always refer to the information described below before starting a
test run:
• When using a servomotor with a brake
• When performing position control from the host controller
J
When Using a Servomotor with Brake
The brake prevents the motor shaft from rotating due to a backdriving torque. Such a
torque may be created by an external force or the force of gravity acting on the load and
may result in undesired motion or the load, should motor power be lost.
2
Install servomotor on machine.
Servomotor
Autotuning:
Automatically measures
machine characteristics and
performs optimum tuning
SERVOPACK Servomotor
SGDB
Host
controller
SERVOPACK
Servomotor
Reference
SERVOPACK
Parameters
Record the settings