Yaskawa SGDB User Manual
Page 69
3.1 Setting Parameters According to Machine Characteristics
57
Bit
Setting
Meaning
0
Uses the P-OT input signal for prohibiting forward rotation. (Forward
rotation is allowed when 1CN-42 is at 0 V.)
Bit 2
1
Does not use the P-OT input signal for prohibiting forward rotation.
(Forward rotation is always allowed. This has the same effect as shorting
1CN-42 to 0 V.)
Bit 3
0
Uses the N-OT input signal for prohibiting reverse rotation. (Reverse
rotation is prohibited when 1CN-43 is open. Reverse rotation is allowed
when 1CN-43 is at 0 V.)
Bit 3
1
Does not use the N-OT input signal for prohibiting reverse rotation.
(Reverse rotation is always allowed. This has the same effect as shorting
1CN-43 to 0 V.)
J
Setting the Motor Stopping Method
If the P-OT and N-OT input signals are used, set the following parameters to specify how
to stop the motor.
Cn-01 Bit 8
How to Stop Motor at
Overtravel
Factory
Setting: 0
Invalid for Torque Control
Cn-01 Bit 9
Operation to be Performed
when Motor Stops after
Overtravel
Factory
Setting: 0
Invalid for Torque Control
• Inputs signal for prohibiting forward rotation
(P-OT, 1CN-42)
• Inputs signal for prohibiting reverse rotation
(N-OT, 1CN-43)
Specify how to stop the motor when either of the
above signals is input.
Setting
Meaning
Cn-01
bit 8
0
Stop the motor in the same way as when the servo is turned OFF.
The motor is stopped by dynamic brake or coasts to a stop. Either of
these stop modes is selected by setting bit 6 of Cn-01.
bit 8
1
Stop the motor by decelerating it with the preset torque.
Preset value: Cn-06 (EMGTRQ) emergency stop torque
If deceleration stop mode is selected, specify the operation to be done after the motor
stops.
Setting
Meaning
Cn 01
0
Turns the servo OFF when the motor stops in deceleration stop mode.
Cn-01
bit 9
1
Causes the motor to enter zero-clamp status after it stops in deceleration
stop mode.
In torque control mode, the motor stops in the same way as when the servo is turned OFF,
regardless of the bit 8 setting.
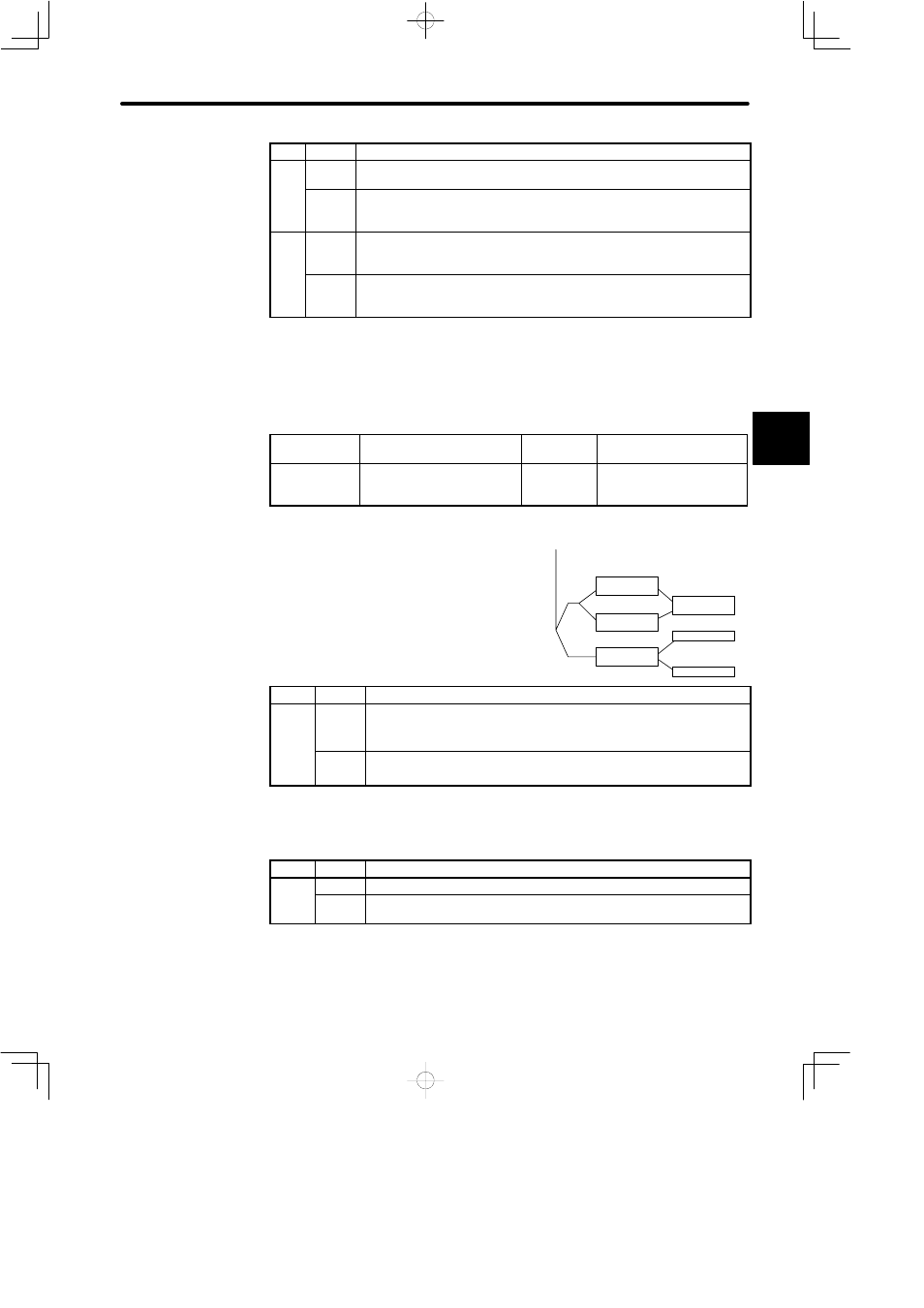
3
Overtravel
Stop mode
After stop
Bit 6
Bit 8
Bit 9
0
0
1
1
Releasing
dynamic brake
Servo OFF
Zero-clamp
Stop by
dynamic brake
Coasting to a
stop
Deceleration
stop
0
1