4 can objects, 5 product features, Can objects – Lenze Engineer v2.21 User Manual
Page 225: Product features, Can objects ( 225), Inserting & configuring a network
Lenze · Engineer · 2.13 EN - 10/2014
225
Inserting & configuring a network
CAN network
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
9.4.4
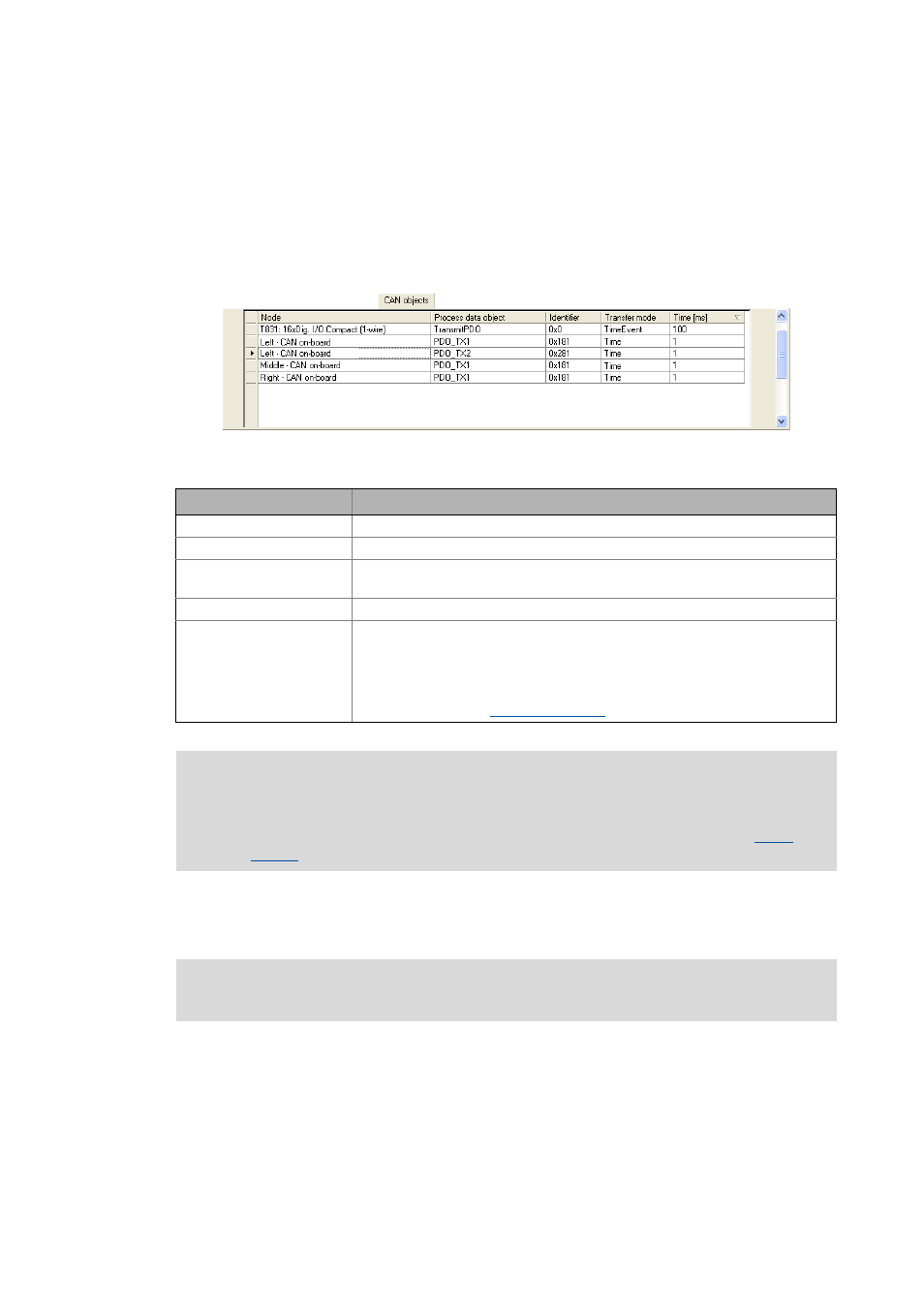
CAN objects
This tab shows you a list of the CAN process data objects (PDOs) to be transferred on the network,
which have been generated in the course of the compilation process.
Objects that have been created by means of a general circuit interconnection of devices, and objects
that have been constrained through deselection of the Automatic allocation control field are
displayed.
The list provides information about the process data objects which are transmitted via the selected
network:
Click the Linking of send and receive objects… button to open a dialog box that displays the linkage
of the sent and received process data objects in the tree structure. For purposes of a better
orientation, the transmission process data objects are sorted according to nodes.
9.4.5
Product features
You can enter a designation for the system module in the Designation text field.
Optionally you can enter a comment on the system module in the Comment text field.
Column
Info
Nodes
Objects of the interconnected circuit.
Process data objects
Application for which the CAN process data object has been created.
Identifier
COD-IDs allocated to the CAN process data object.
• This setting can also be altered in the list.
Transfer mode
Transfer mode which is used for sending the CAN process data object.
Time [ms]
The time is set to 100 ms by default.
Note: To ensure that an electrical shaft functions optimally, the transmission time
of the send objects (TPDOs) must have been set to 1 ms.
• You can find further details on the processing of transmission parameters in the
following section:
Note!
The CAN objects tab cannot be edited.
• The information displayed is only valid for a completely updated project.
Further information about the CAN bus connection is provided in the documentation for
the respective controller.