Chapter 7 troubleshooting 7.4 alarm list – IAI America ERC3 User Manual
Page 374
Chapter 7
Troubleshooting
7.4
Alarm List
364
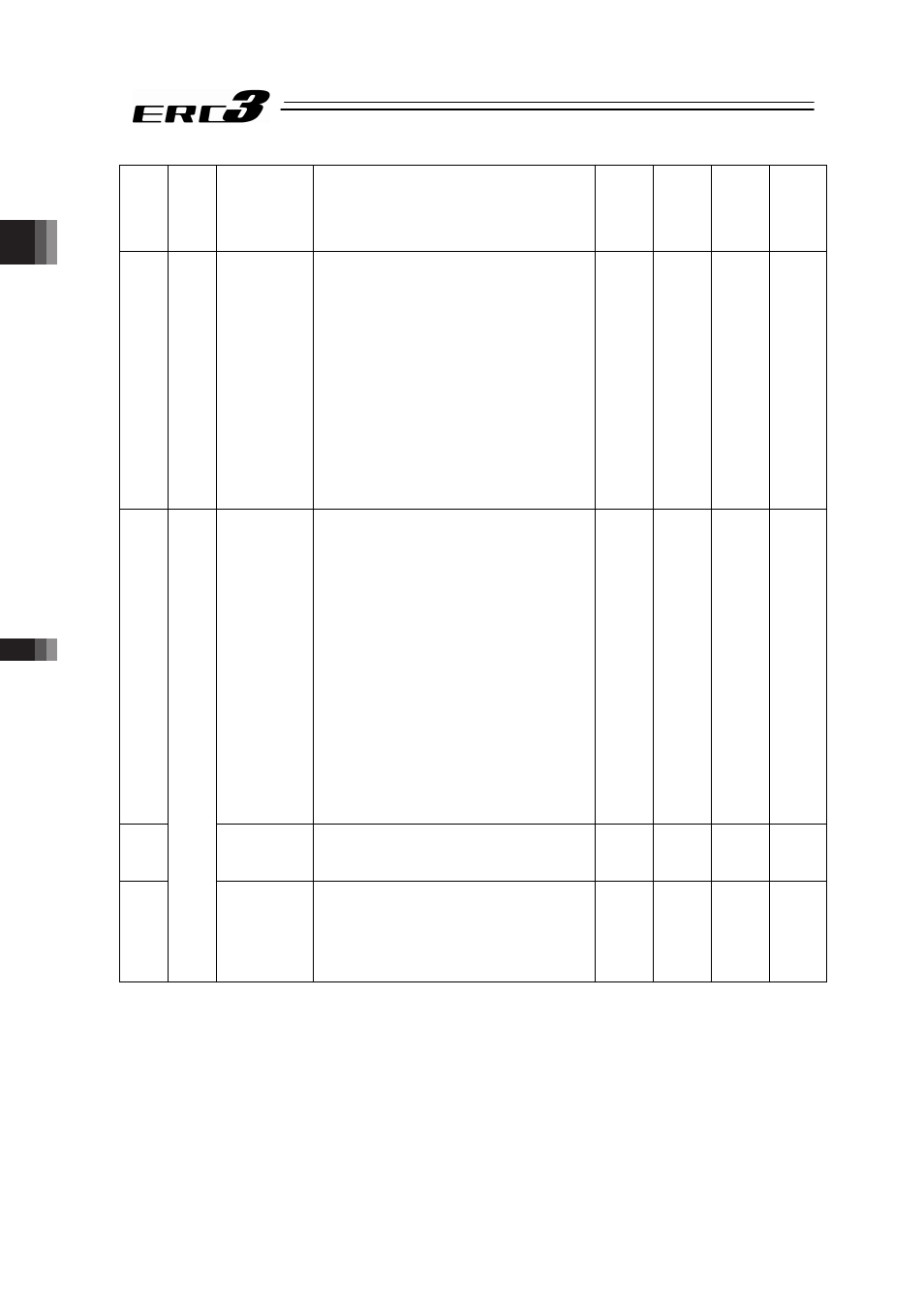
Alarm
Code
Alarm
Level
Alarm Name
Cause/Treatment
Positioner
Mode 1
Pulse
Train
Control
Mode
Positioner
Mode 2
MEC
Mode 1
MEC
Mode 2
0A1
C
ol
d s
ta
rt
Parameter data
error
Cause
: The data input range in the parameter
area is not appropriate.
Example 1) This occurs when the
relation of the positive and
negative sides of the soft
limit is clearly
inappropriate, for
example, when the value
for the soft limit positive
side is set to 200.3mm
while the soft limit
negative side is 300mm,
in Positioner Mode 1 or
Positioner Mode 2.
[Refer to 3.2 [2] Soft limit
+, Soft limit -]
Treatment : Change the value to the appropriate
one.
{
{
{
{
0A2
Position data
error
Cause
: 1) A move command was input when
no target position was set in the
“Position” field of a position No. in
the position table.
2) The value of the target value in the
“Position” field exceeded the
Parameter No.3 and 4 “Soft limit set
value”.
3) The target position in “Position” box
is indicated in a number for relative
coordinates in Electromagnetic
Valve Type in PIO Pattern 1 of
Positioner Mode 1 or
Electromagnetic Valve Mode 2 in
PIO Pattern 5 of Positioner Mode 2.
Treatment : 1) Set the target position.
2) Change the target position value to
the one within the soft limit set
value.
3) The target position cannot be set by
relative coordinate (incremental
feed).
{
{
{
{
0A3
Position
command data
error
Cause
: 1) The value for the velocity or
acceleration/deceleration exceeds
the maximum setting.
Treatment : 1) Table to input a proper value.
{
{
{
{
0A4
Oper
ation releas
e
Command
counter overflow
Cause
: The number of input command pulses
exceeded the range of -134217728 to
+134217728 (H'F8000000 to
'07FFFFFF).
Treatment : Attempt to make the value of the
electrical gear ratio smaller (make the
movement against the unit bigger).
{
Ч
Ч
Ч