Chapter 7 troubleshooting 7.4 alarm list – IAI America ERC3 User Manual
Page 373
Chapter 7
Troubleshooting
7.4
Alarm List
363
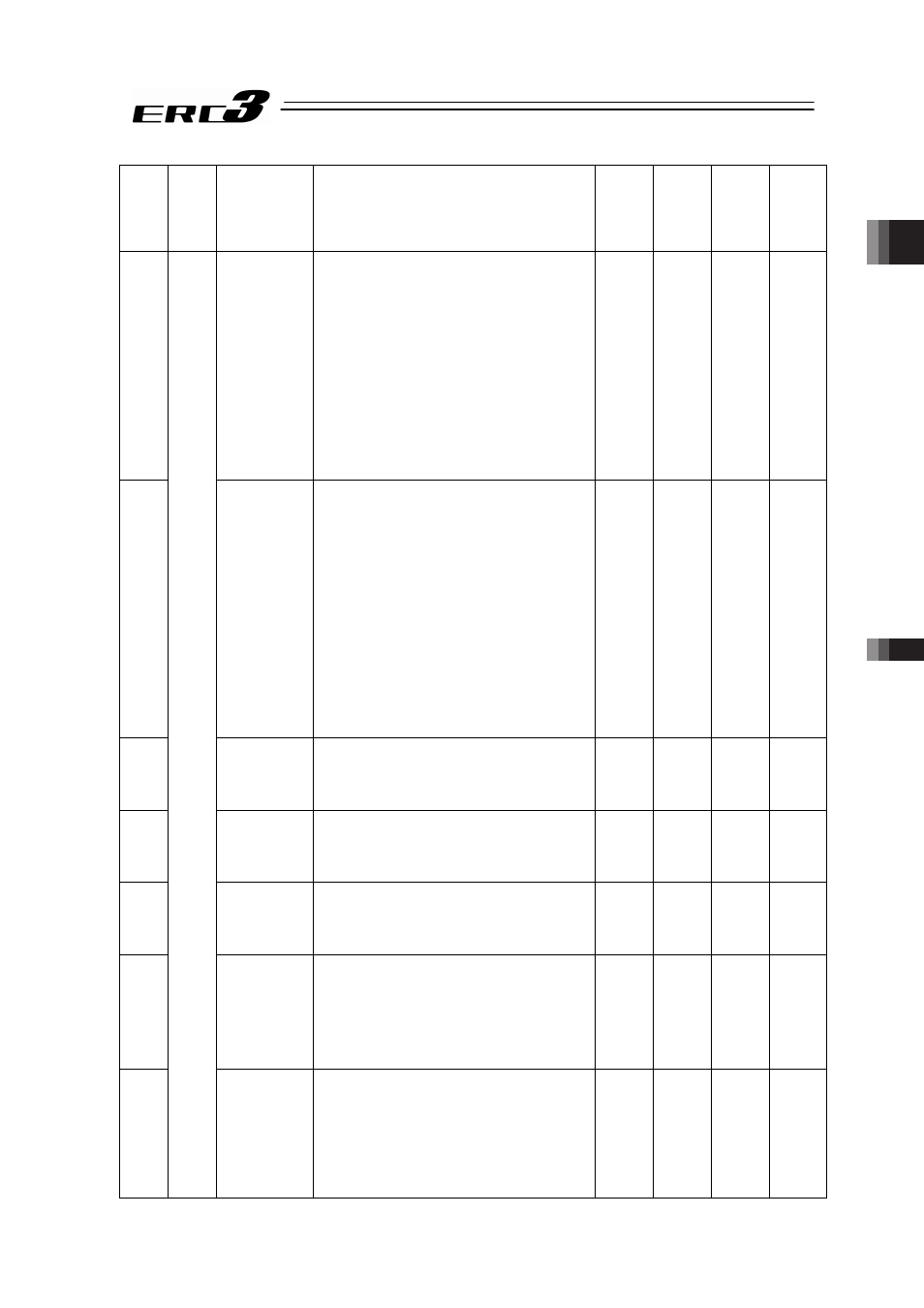
Alarm
Code
Alarm
Level
Alarm Name
Cause/Treatment
Positioner
Mode 1
Pulse
Train
Control
Mode
Positioner
Mode 2
MEC
Mode 1
MEC
Mode 2
082
Position
command in
incomplete
home return
Cause
: A position move command was issued
before home return was completed.
Treatment : 1) Positioner Mode 1, Positioner Mode
2, Pulse Train Control Mode
Issue a command after confirming
that home return has been
completed HEND is ON.
2) MEC Mode 1, MEC Mode 2
In the case of 2-point stop, make
sure the home-return complete
HEND signal is ON before making a
movement command.
In the case of 3-point stop, input
ST0 Signal to perform a
home-return operation before
making a movement command.
{
{
{
{
084
Absolute
position move
command when
home return is
not yet
completed
Cause
: A move command was issued when
home return was still in progress.
Treatment : 1) Positioner Mode 1, Positioner Mode
2, Pulse Train Control Mode
Issue a movement command after
performing home return operation
and confirming the complete signal
HEND.
2) MEC Mode 1, MEC Mode 2
In the case of 2-point stop, perform
a home-return operation and
confirm the home-return complete
HEND signal before making a
movement command.
In the case of 3-point stop, turn OFF
the movement command, reset the
alarm and redo the home-return
operation.
{
{
{
{
085
Position No.
error during
movement
Cause
: A non-existing (invalid) position
number was specified in the positioner
mode.
Treatment : Check the position table again and
indicate an effective position number.
{
{
Ч
Ч
090
Software reset
during servo ON
Cause
: A software reset command was issued
when the servo was ON.
Treatment : Issue a software reset command after
confirming that the servo is OFF (SV
signal is 0).
{
{
{
{
091
Position No.
error in teaching
Cause
: The position number out of the
available range was selected in the
teaching.
Treatment : Select the position number from 63 or
smaller.
{
{
Ч
Ч
092
PWRT signal
detection during
movement
Cause
: Input was made while the current
position writing signal PWRT is in the
JOG operation in Teaching Mode of
PIO Pattern 1.
Treatment : Input the PWRT signal after confirming
that the job button is not pressed and
the actuator is stopped (MOVE output
signal is OFF).
Ч
{
Ч
Ч
093
Oper
ation releas
e
PWRT signal
detection in
incomplete
home return
Cause
: Input was made while the current
position writing signal PWRT is in
home-return incomplete in Teaching
Mode of PIO Pattern 1.
Treatment : Input the HOME signal first to perform
home return, and then input the PWRT
signal after confirming that the home
return has completed (HEND output
signal is ON).
Ч
{
Ч
Ч