IAI America ERC3 User Manual
Page 194
Chapter 4 Operation
4.2 Operation in Positioner Mode
4.2.2 Operation in Positioner Mode 1
184
(7) Pause and Operation Interruption (*STP, PEND)
Input
Output
Model name
PIO signal
*STP
PEND
ERC3 Main Body Pattern 0 and 2
{
{
{
: Available, u: Unavailable
Control method
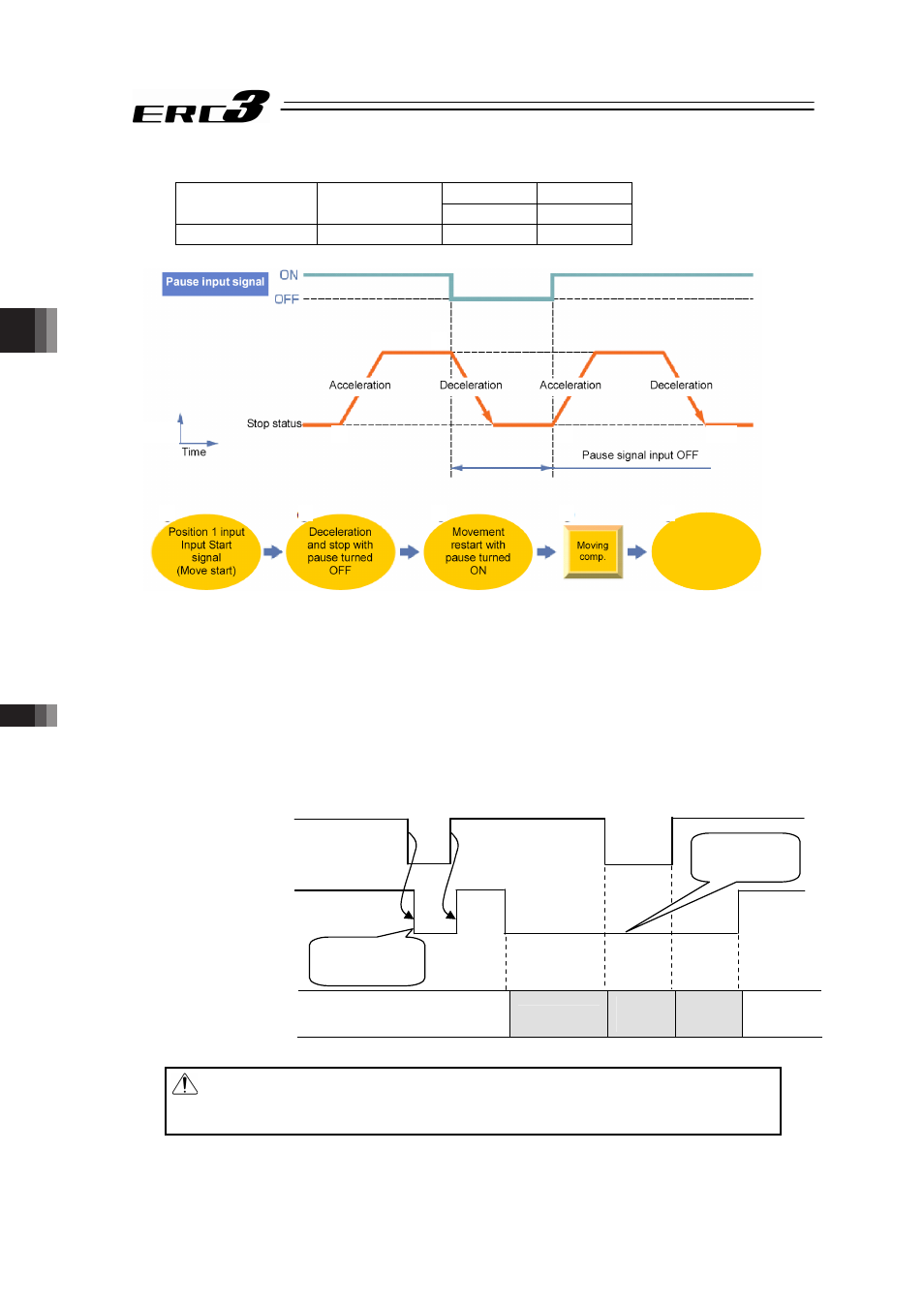
Pause is possible during movement. The pause signal is an input signal always set to ON. So,
it is normally used to remain ON. Use this as an interlock in such a case interference gets into
the moving direction while the actuator is operating.
1) If pause signal *STP is turned off during operation of the actuator, the actuator is
decelerated to a stop. The deceleration is defined by the value set in the position table.
2) The positioning complete signal PEND would not turn ON while in pause.
3) If pause signal *STP is returned to ON, the actuator continues the remaining movement.
The acceleration is the value set in the position table.
Caution: Turning *STP OFF with the actuator being in the positioning complete state
causes PEND to be turned OFF. Note that this situation may not occur
when a sequence program is created.
Before operation
Positioning complete state
Operation
Temp.
stop
Cont.
Op.
Position
complete
Pause signal *STP
(PLCoController)
Positioning completion signal
PEND
(ControlleroPLC)
Operation of actuator
PEND turned
OFF
PEND not
turned ON
Velocity
Positioning
Completion
Signal Output
1)
2)
3)
4)
5)
1)
2)
3)
4) 5)