IAI America ERC3 User Manual
Page 250
Chapter 4 Operation
4.2 Operation in Positioner Mode
4.2.3 Operation in Positioner Mode 2 (Operation Using PIO Converter)
240
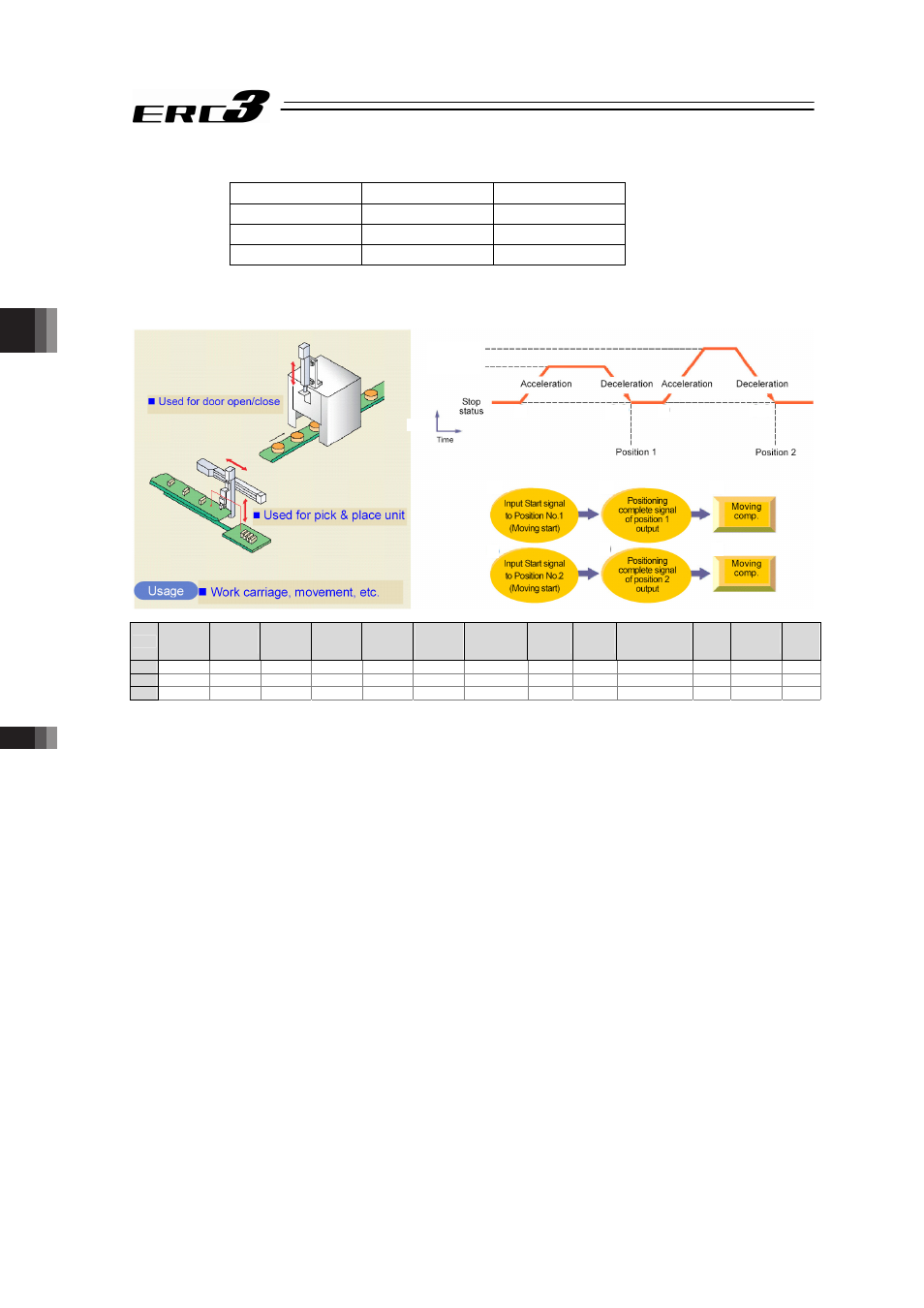
(3) Positioning [Basic] (ST0 to ST2, LS0 to LS2)
Position No.
Input
Output
0
ST0
LS0
1
ST1
LS1
2
ST2
LS2
[Caution] Pressing and pitch feed are unavailable.
Sample use
No.
Position
[mm]
Velocity
[mm/s]
Accele-
ration
[G]
Decele-
ration
[G]
Pressing
[%]
Thresh-
old
[%]
Positioning
width
[mm]
Zone+
[mm]
Zone-
[mm]
Acceleration/
Deceleration
mode
Incre-
mental
Transported
load
Stop
mode
0
0.00
100.00
0.20
0.20
0
0
0.10
0.00
0.00
0
0
0
0
1
70.00
100.00
0.20
0.20
0
0
0.10
0.00
0.00
0
0
0
0
2
150.00
200.00
0.20
0.20
0
0
0.10
0.00
0.00
0
0
0
0
Control method
1) When start signal ST* is turned ON, the actuator starts acceleration based on the data in
the specified position table for positioning to the target position. Turning the ST* signal OFF
on the way causes the actuator to be decelerated and stopped. So, make the ST* signal
remain ON until the actuator reaches the target position.
2) At the completion of positioning, position detection output LS* of the specified position is
turned ON.
3) Position detection output LS* is turned ON if the remaining moving distance enters into the
positioning width. LS* is set to ON if the current position is located within the positioning
width zone or OFF if the current position is located out of the positioning width zone (the
same situation occurs in the servo OFF status).
4) Leave the ST* signal to be ON until the actuator is moved to another position and turn OFF
it at the next ST* signal. If the ST* signal is turned OFF at the LS* signal, the actuator is
decelerated to a stop in the positioning width and thus the actuator may not reach the
target position. In continuous operation, turn ON the next ST* signal by setting the
positioning width within the required precision range or setting the period taken from
detection of the LS* signal to reaching the target position.
Velocity
1)
2)
3)
4)
5)
6)
1)
2) 3)
4)
5) 6)
200mm/s
100mm/s