IAI America ERC3 User Manual
Page 148
Chapter 3 Wiring
3.5 MEC Mode 2 (Operation Using PIO Converter)
138
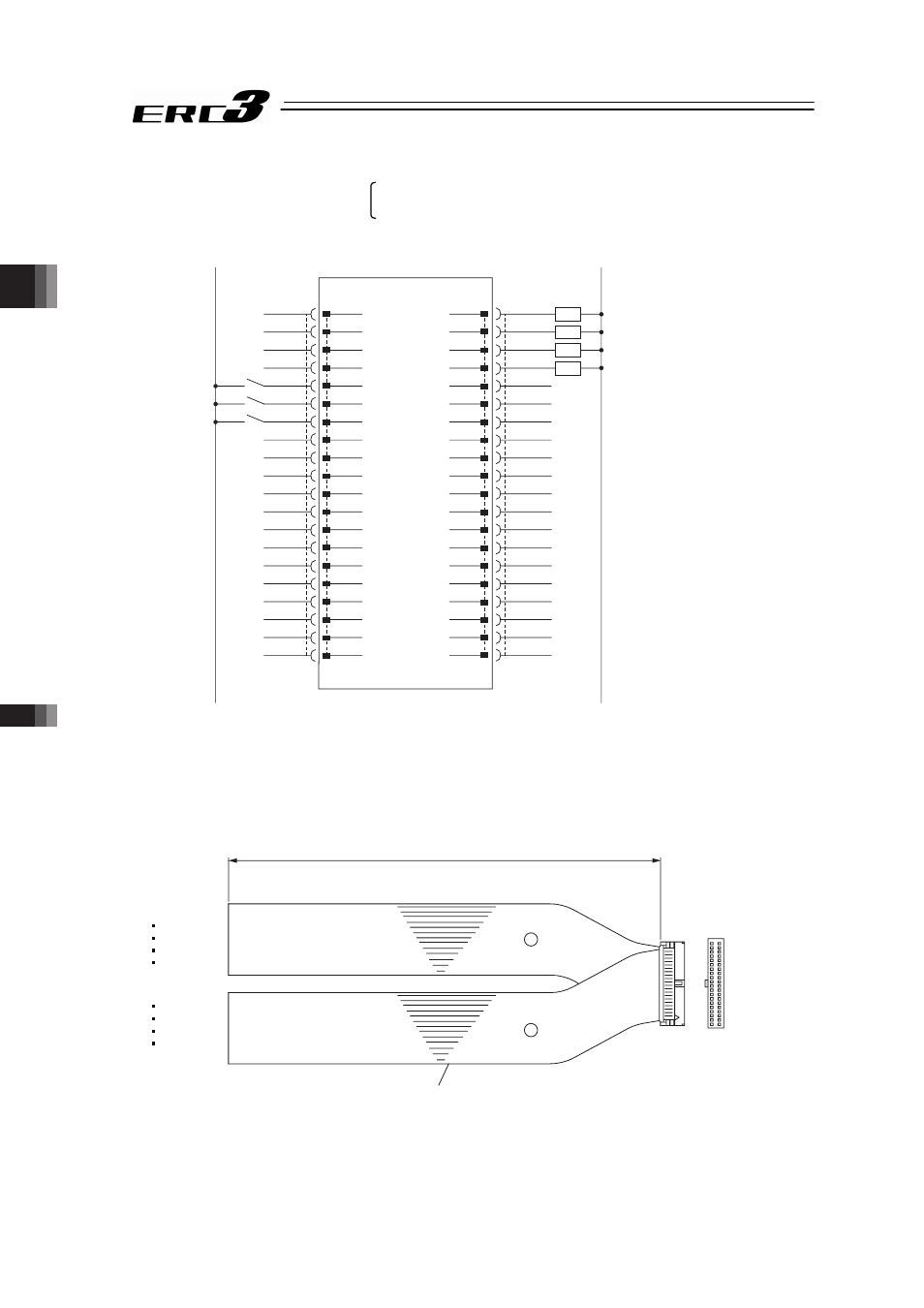
2) Stopping at 3 points (3-point positioning)
······································· Movement by 2 input between 2 points (Double-solenoid mode)
Movement by 2 input between 3 points (3-point positioning)
0V(NPN Type)
BR- 1
1A
LS0/PE0
1B
BR- 3
24V DC(NPN Type)
24V DC(PNP Type)
RD- 1
2A
LS1/PE1
2B
RD- 3
0V(PNP Type)
Move Signal 1
OR- 1
3A
ST0
LS2/PE2
3B
OR- 3
Start point detection/
Positioning to start point complete
YW- 1
4A
*ALM
4B
YW- 3
End point detection/
Positioning to end point complete
Reset
GN- 1
5A
RES
5B
GN- 3
Intermediate point detection/
Positioning to intermediate point complete
BL- 1
6A
6B
BL- 3
Alarm
PL- 1
7A
7B
PL- 3
GY- 1
8A
8B
GY- 3
WT- 1
9A
9B
WT- 3
BK- 1
10A
10B
BK- 3
BR- 2
11A
11B
BR- 4
RD- 2
12A
12B
RD- 4
OR- 2
13A
13B
OR- 4
YW- 2
14A
14B
YW- 4
GN- 2
15A
15B
GN- 4
BL- 2
16A
16B
BL- 4
PL- 2
17A
17B
PL- 4
GY- 2
18A
18B
GY- 4
WT- 2
19A
19B
WT- 4
BK- 2
20A
20B
BK- 4
PIO Converter
PIO Connector
Move Signal 2
ST1
“*” in codes above shows the signal of the active low. Processing occurs when an input signal
of the type is turned OFF. An output signal of the type is normally ON in the power-on status
and turned OFF at signal output.
Ɣ Use the attached cable for the I/O connection.
Model : CB-PAC-PIOƑƑƑ (ƑƑƑ indicates the cable length L. Example. 020 2m)
Flat Cable (20-core) × 2
BK-4 (20B)
BR-3 (1B)
BK-2 (20A)
BR-1 (1A)
20A
20B
1A
1B
Half Pitch MIL Socket
HIF6-40D-1.27R (Hirose Electric)
A
B
L
No treatment
conducted
No treatment
conducted