Sample use – IAI America ERC3 User Manual
Page 182
Chapter 4 Operation
4.2 Operation in Positioner Mode
4.2.2 Operation in Positioner Mode 1
172
[7] Operation with the Position No. Input = Operations of PIO Patterns 0 and 2
Described in this section is how to operate in PIO Pattern 0 and 2 of ERC3 unit. These patterns
provide normal controller operation methods in which the ROBO cylinder is operated by turning
the start signal ON after a position No. is entered.
Positioning, pitch feeding and pressing operations differ only in the settings in the position table
and are the same in how to control the sequence.
(1) Positioning [Basic] (PC1 to PC*, CSTR, PEND, HEND)
Input
Output
Model name
PIO signal
PC1 to PC*
CSTR
PEND
HEND
PIO pattern 0
PC1 to 4
{
{
{
ERC3 Main Body
PIO pattern 2
PC1 to 8
{
{
{
{
: Available, u: Unavailable
[Caution] If the start signal CSTR is turned ON without performing a home-return operation
after the power is turned ON, it automatically performs the home-return operation,
and then conducts a positioning operation to the position number indicated at that
time.
Also, there is no home-return signal in PIO Pattern 2. For such operations as
interlocking, refer to “Home-Return Operation without Home-Return Signal”
described later.
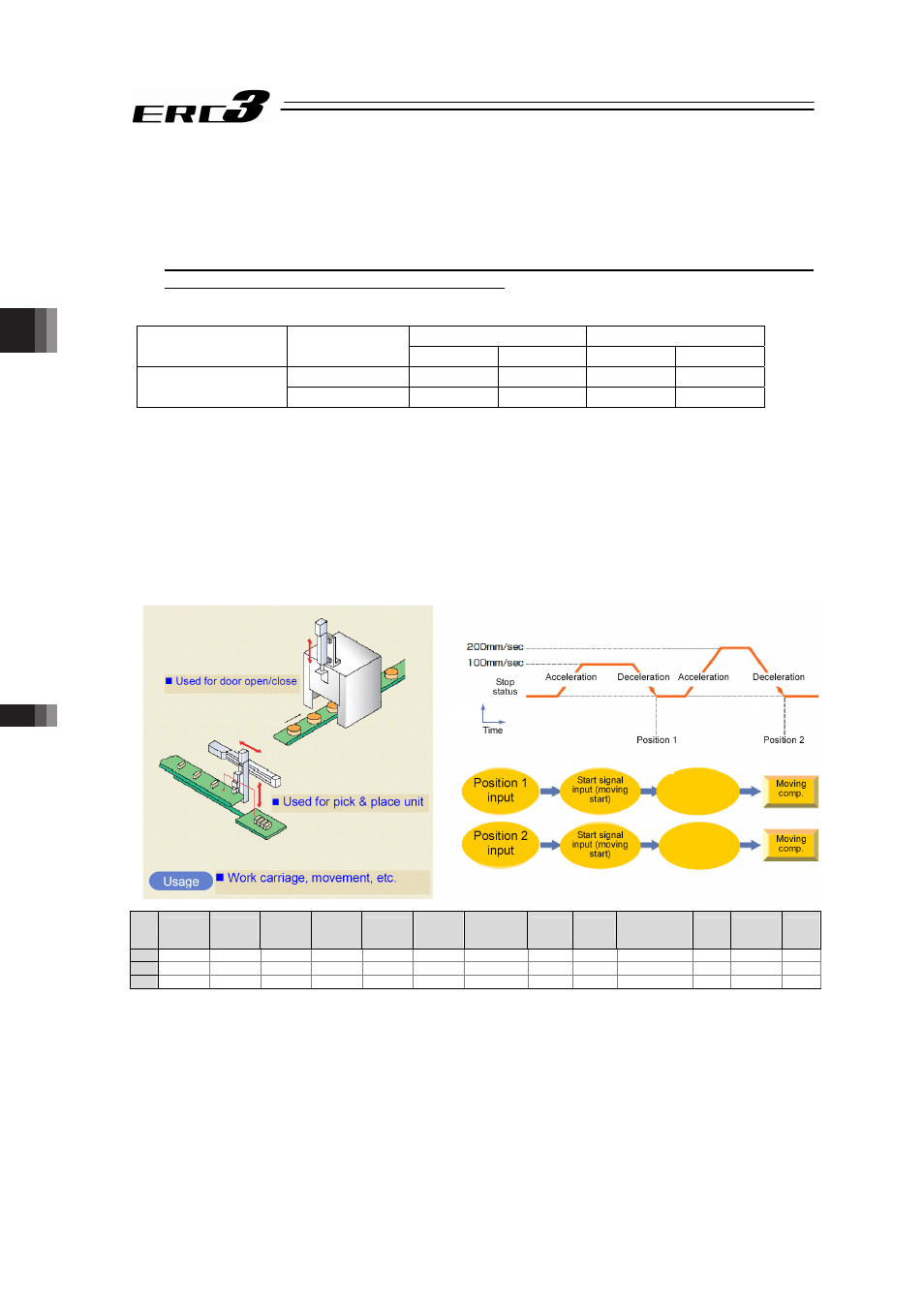
Sample use
No.
Position
[mm]
Velocity
[mm/s]
Accele-
ration
[G]
Decele-
ration
[G]
Pressing
[%]
Thresh-
old
[%]
Positioning
width
[mm]
Zone+
[mm]
Zone-
[mm]
Acceleration/
Deceleration
mode
Incre-
mental
Transported
load
Stop
mode
0
1
70.00
100.00
0.20
0.20
0
0
0.10
0.00
0.00
0
0
0
0
2
150.00
200.00
0.20
0.20
0
0
0.10
0.00
0.00
0
0
0
0
Positioning
Completion
Signal Output
Velocity
Positioning
Completion
Signal Output
1)
2)
3)
4)
5)
6)
7)
8)
1) 2)
5) 6)
3) 4)
7) 8)