Sample use – IAI America ERC3 User Manual
Page 219
Chapter 4 Operation
4.2 Operation in Positioner Mode
4.2.3 Operation in Positioner Mode 2 (Operation Using PIO Converter)
209
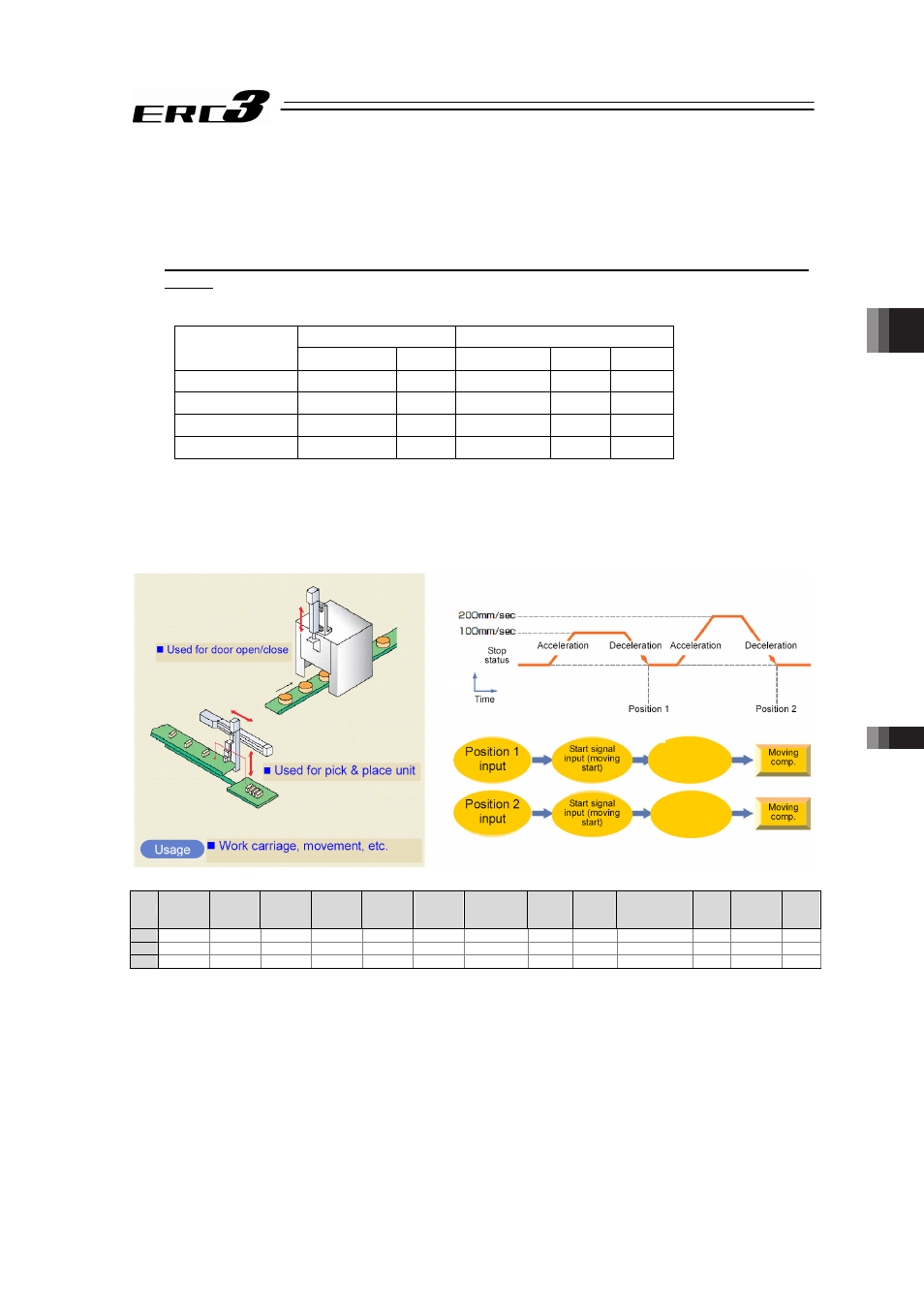
[6] Operation with the Position No. Input = Operations of PIO Patterns 0 to 3
This is the operation method for PIO Patterns 0 to 3. This is a standard operation method when
using PIO Converter that operates by turning the start signal ON after inputting the position
number.
The control methods of positioning, pitch feed, and pressing are the same as those described
before.
(1) Positioning [Basic] (PC1 to PC**, CSTR, PM1 to PM**, PEND, MOVE)
Input
Output
PIO signal
PC1 to PC** CSTR PM1 to PM** PEND MOVE
PIO pattern 0
PC1 to 32
{
PM1 to 32
{
{
PIO pattern 1
PC1 to 32
{
PM1 to 32
{
{
PIO pattern 2
PC1 to 128
{
PM1 to 128
{
u
PIO pattern 3
PC1 to 256
{
PM1 to 256
{
u
{
: Available, u: Unavailable
(Note) Operation without home return leads the operation based on the data of the specified
position No. after automatic home return. If one or more problems are found, interlock
by home return complete signal HEND is required.
Sample use
No.
Position
[mm]
Velocity
[mm/s]
Accele-
ration
[G]
Decele-
ration
[G]
Pressing
[%]
Thresh-
old
[%]
Positioning
width
[mm]
Zone+
[mm]
Zone-
[mm]
Acceleration/
Deceleration
mode
Incre-
mental
Transported
load
Stop
mode
0
1
70.00
100.00
0.20
0.20
0
0
0.10
0.00
0.00
0
0
0
0
2
150.00
200.00
0.20
0.20
0
0
0.10
0.00
0.00
0
0
0
0
Positioning
Completion
Signal Output
Velocity
Positioning
Completion
Signal Output
1)
2)
3)
4)
5)
6)
7)
8)
1) 2)
5) 6)
3) 4)
7) 8)