4 alarm list, Chapter 7 troubleshooting 7.4 alarm list – IAI America ERC3 User Manual
Page 372
Chapter 7
Troubleshooting
7.4
Alarm List
362
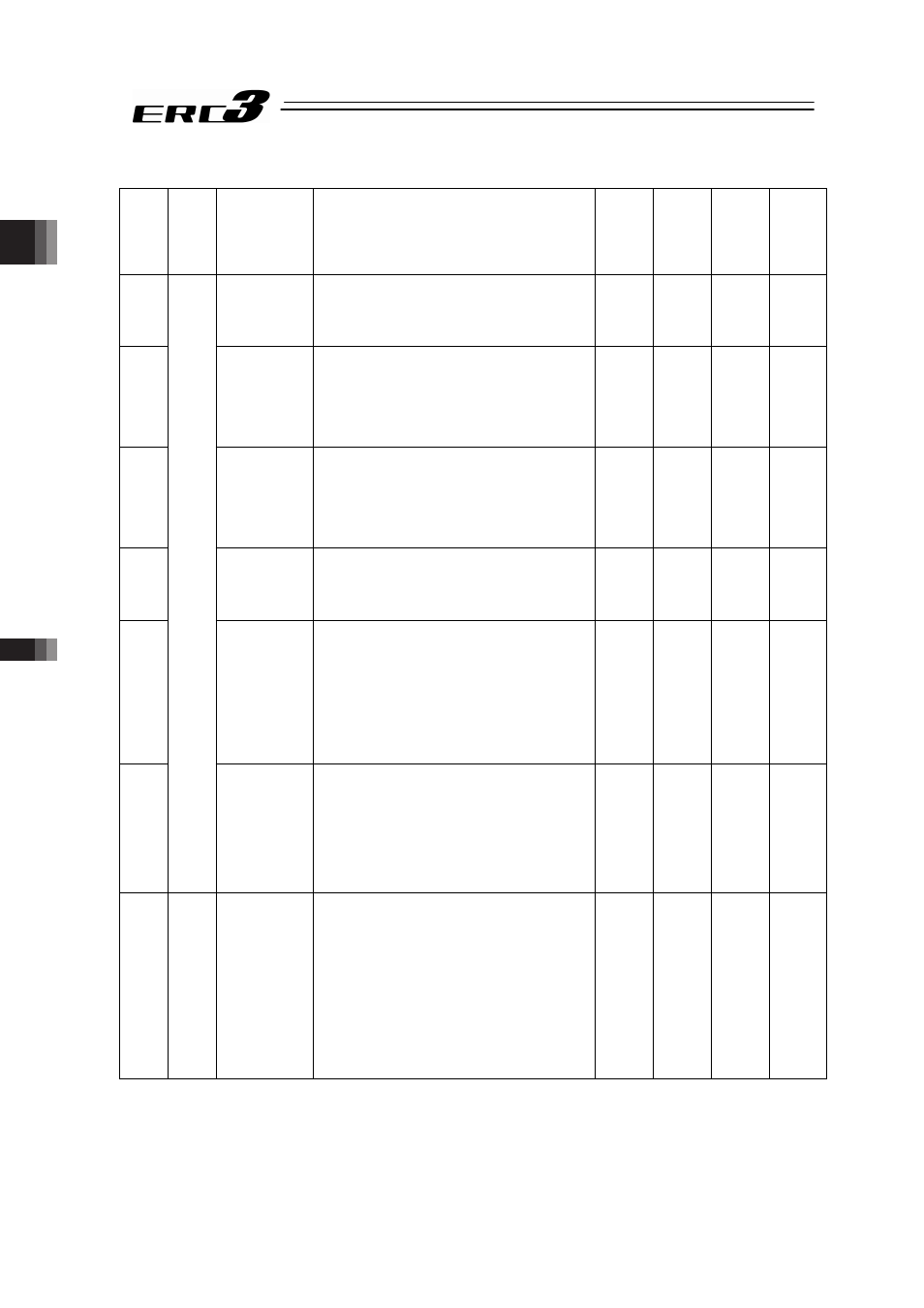
7.4 Alarm List
Alarm
Code
Alarm
Level
Alarm Name
Cause/Treatment
Positioner
Mode 1
Pulse
Train
Control
Mode
Positioner
Mode 2
MEC
Mode 1
MEC
Mode 2
02C
Monitoring data
type change
command during
monitoring
Cause
: Changing data type was directed
during monitoring by the monitoring
function of PC software.
Treatment : Stop the monitoring before changing
data type.
{
{
Ч
Ч
02D
Monitoring
related
command in
monitoring
function invalid
status
Cause
: An attempt was made to perform
monitoring in the state where the
monitoring function is set to be
ineffective.
Treatment : Set parameter No.112 (Selection of
monitoring mode) to “1” or “2” (“0”: no
use).
{
{
Ч
Ч
02E
RTC related
command in
RTC invalid
status
Cause
: An attempt was made to use the
calendar in the state where the RTC
(calendar) function was made
ineffective.
Treatment : Set parameter No.111 (Selection of
use of calendar function) to “1” (“0”: no
use).
Ч
{
Ч
Ч
048
Driver overload
alarm
Cause
: There is a risk of overload with the
current operation condition.
Treatment : Lower the setting of
acceleration/deceleration. Also,
increase the frequency of pause.
{
{
{
{
04E
Exceeded
movement count
threshold
Cause
: In the case of Positioner Mode 2, the
total number of movement exceeded
the number set in Parameter No.147
“Threshold for Total Number of
Movement”.
In the case of MEC Mode 2, the total
number of movement exceeded the
number set in Parameter No.26
“Threshold for Total Number of
Movement”.
Ч
{
Ч
{
04F
M
es
sa
ge
Exceeded
operated
distance
threshold
Cause
: In the case of Positioner Mode 2, the
total distance of actuator drive
exceeded the number set in
Parameter No.148 “Threshold for Total
Distance of Drive”.
In the case of MEC Mode 2, the total
distance of actuator drive exceeded
the number set in Parameter No.27
“Threshold for Total Number of Drive”.
Ч
{
Ч
{
080
Oper
ation releas
e
Move command
in servo OFF
Cause
: A move command was issued when
the servo is OFF.
Treatment : 1) Positioner Mode 1, Positioner Mode
2, Pulse Train Control Mode
Issue a movement command after
confirming the servo is ON (servo
ON signal SV or position complete
signal PEND is ON).
2) MEC Mode 1, MEC Mode 2
Cancel the emergency stop if it is
not yet cancelled, and turn the
servo ON to make a movement
command.
{
{
{
{