IAI America ERC3 User Manual
Page 339
Chapter 6
Adjustment of Operation
6.3 I/O Parameter
6.3.1 Positioner Mode 1, Positioner Mode 2 and Pulse
Train Control Mode
329
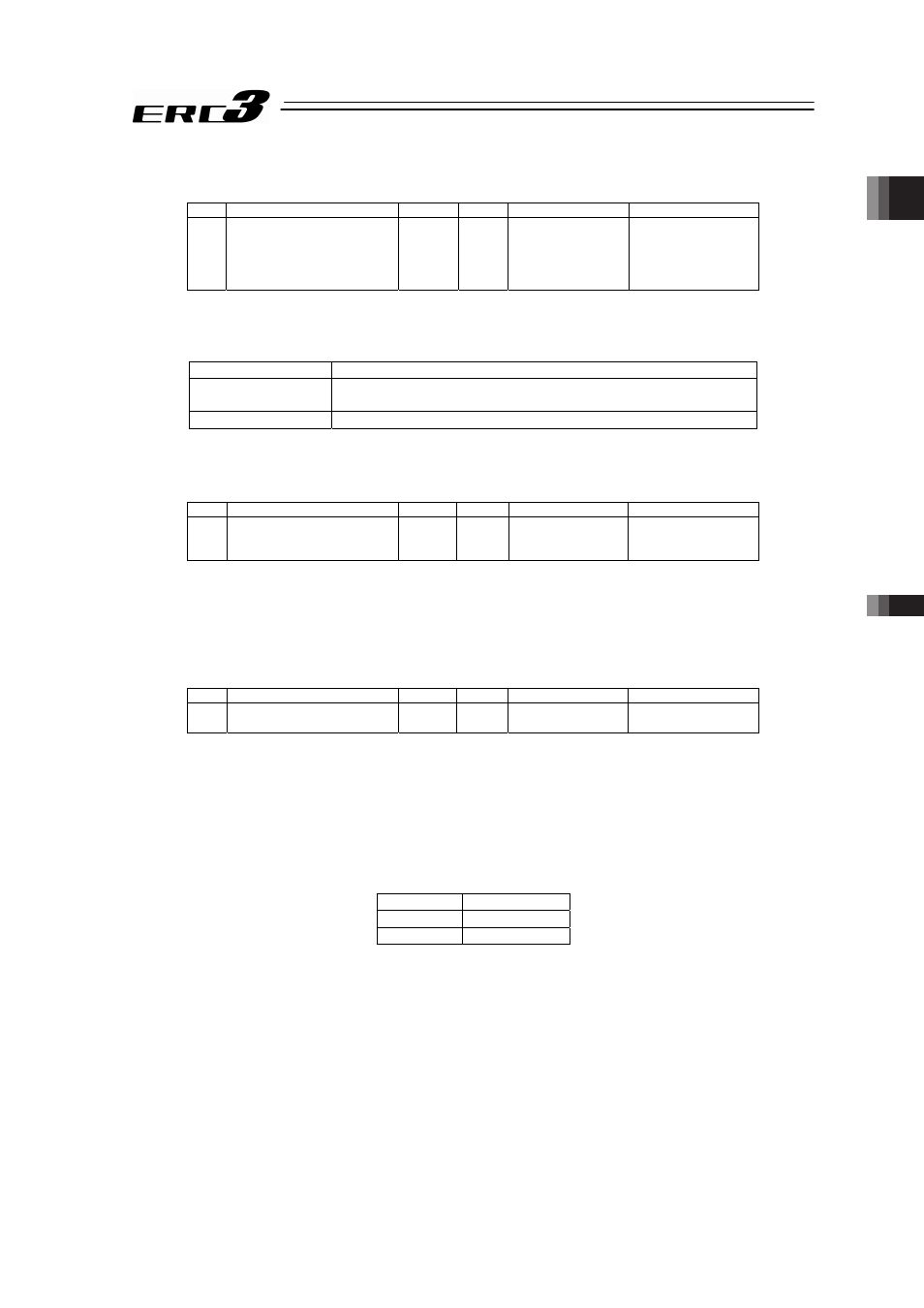
(57) Current limit value at stopping due to miss-pressing (Parameter No.91)
No.
Name
Symbol
Unit
Input Range
Default factory setting
91
Current limit value at stopping
due to miss-pressing
PSFC
–
0: Current limiting
value at stop
1: Current limit
value during
pressing
0
This parameter defines the restricted current value at stopping due to miss-pressing.
Servo-lock is executed following this setting until the next movement command.
Parameter No.91
Description
0
Current limitation value while in operation stop (setting value in the
current limiting value at positioning stop (Parameter No.12))
1
Press-motion current-limiting value
(58) Stop method at servo OFF (Parameter No.110)
No.
Name
Symbol
Unit
Input Range
Default factory setting
110 Stop method at servo OFF
PSOF
–
0: Rapid stop
1: Deceleration to
stop
0
Select the stop method of when the servo is turned OFF during an operation. If 1 is selected,
the actuator decelerates with position data in execution and stops.
(59) Calendar function (Parameter No.111)
No.
Name
Symbol
Unit
Input Range
Default factory setting
111 Calendar function
FRTC
–
0: Unused
1: Use
1
Select use/not use of the calendar function (RTC) in PIO converter.
Set the current time with using a teaching tool when the calendar function is used.
[Refer to the instruction manual of the teaching tool for the details.]
In use of RTC, the alarm occurrence time in the alarm list is the time at which an alarm has
occurred.
If RTC is not in use, the alarm generated time in the alarm list shows the time passed since
0sec that is the time the power is supplied to the controller.
Set Value
Description
0
Unused
1
Use