IAI America ERC3 User Manual
Page 195
Chapter 4 Operation
4.2 Operation in Positioner Mode
4.2.2 Operation in Positioner Mode 1
185
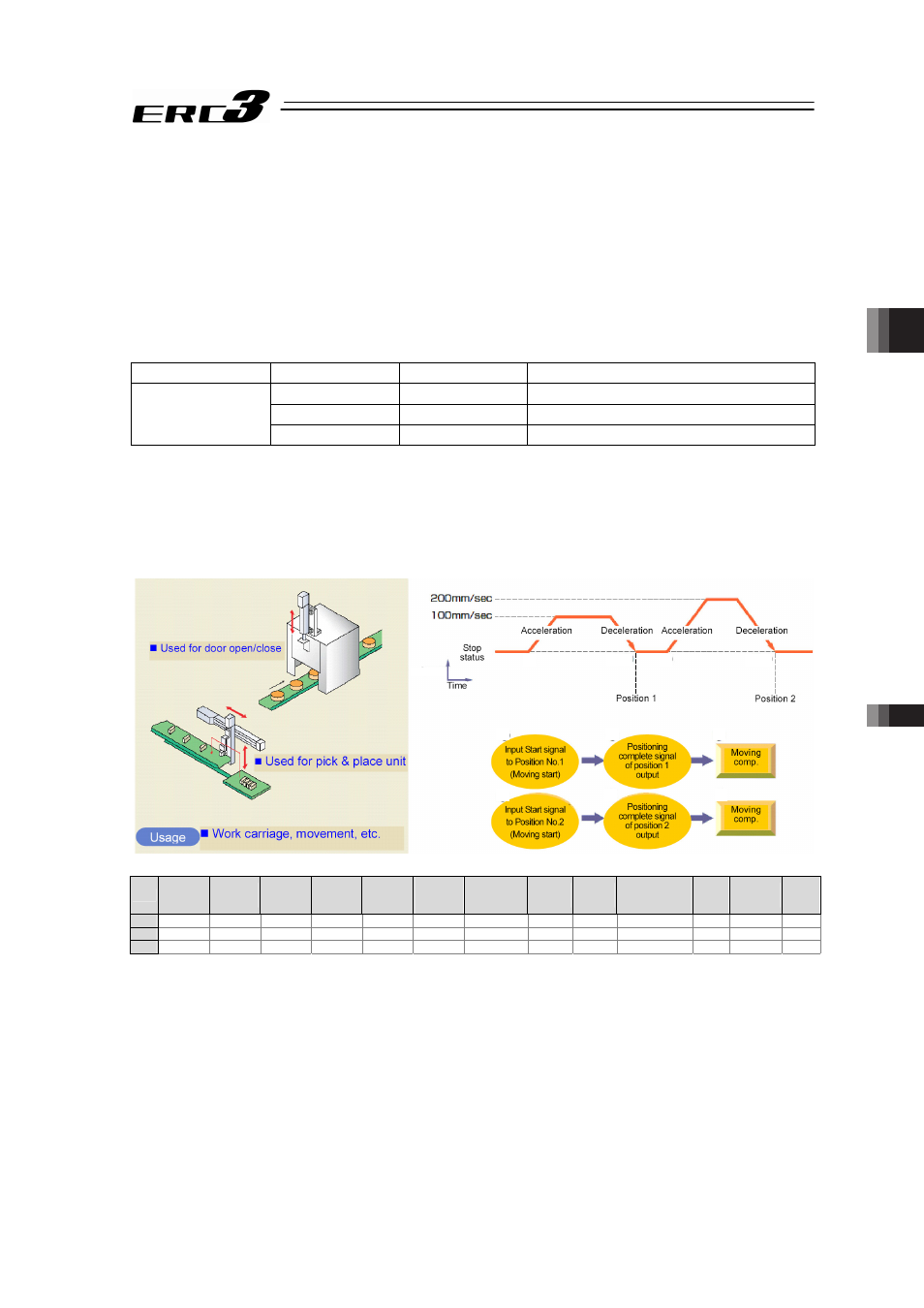
[8] Direct Position Specification (3-point
The start signal is provided for every position number. Only turning ON the relevant input signal
according to the table shown below allows the operation based on the data in the target
position number to be performed. The operation mode is called the solenoid valve mode
because solenoid valves can directly drive air cylinders.
Also, the complete position number is output for each position number once positioning is
complete.
Positioning, pressing, and pitch feed are possible. Their control methods are the same as those
of other patterns.
(1) Positioning [Basic] (ST0 to ST2, PE0 to PE2)
Model name
Position No.
Input
Output
0
ST0
PE0
1
ST1
PE1
ERC3 Main Body
2
ST2
PE2
[Caution] x Speed change is not allowed during movement.
x
There is no home-return signal. The actuator automatically performs the
home-return operation with the first start signal ST* after the power is turned ON,
and then performs an operation regarding the data in the indicated position
number. For the details refer to “Home-Return Operation” described later.
Sample use
No.
Position
[mm]
Velocity
[mm/s]
Accele-
ration
[G]
Decele-
ration
[G]
Pressing
[%]
Thresh-
old
[%]
Positioning
width
[mm]
Zone+
[mm]
Zone-
[mm]
Acceleration/
Deceleration
mode
Incre-
mental
Transported
load
Stop
mode
0
0.00
100.00
0.20
0.20
0
0
0.10
0.00
0.00
0
0
0
0
1
70.00
100.00
0.20
0.20
0
0
0.10
0.00
0.00
0
0
0
0
2
150.00
200.00
0.20
0.20
0
0
0.10
0.00
0.00
0
0
0
0
Control method
1) When start signal ST* is turned ON, the actuator starts acceleration based on the data in
the specified position table for positioning to the target position.
2) Current Position No. PE* of the commanded position turns ON once the positioning is
complete.
3) Once the current position No. PE* signal turns ON, turn OFF ST* Signal.
4) Current Position No. PE* turns ON if the remaining movement amount is in the range of the
positioning width. PE* signal that is turned ON will remain ON unless the start signal ST*
turns ON again, or the servo is turned OFF. It would not turn OFF even if it goes out of the
positioning width.
(Note 1)
Note 1 If INP (setting number: 1) is selected in Parameter No.39, PE* becomes INP (In-position) Signal,
and will turn OFF when it goes out of the positioning width.
(Note) It can be switched over with Parameter No.39.
Velocity
1)
2)
3)
4)
5)
6)
1)
2) 3)
4)
5) 6)