3) pressing operation sample use, Positioning by setting of coordinate value, Stop of pressing – IAI America ERC3 User Manual
Page 199
Chapter 4 Operation
4.2 Operation in Positioner Mode
4.2.2 Operation in Positioner Mode 1
189
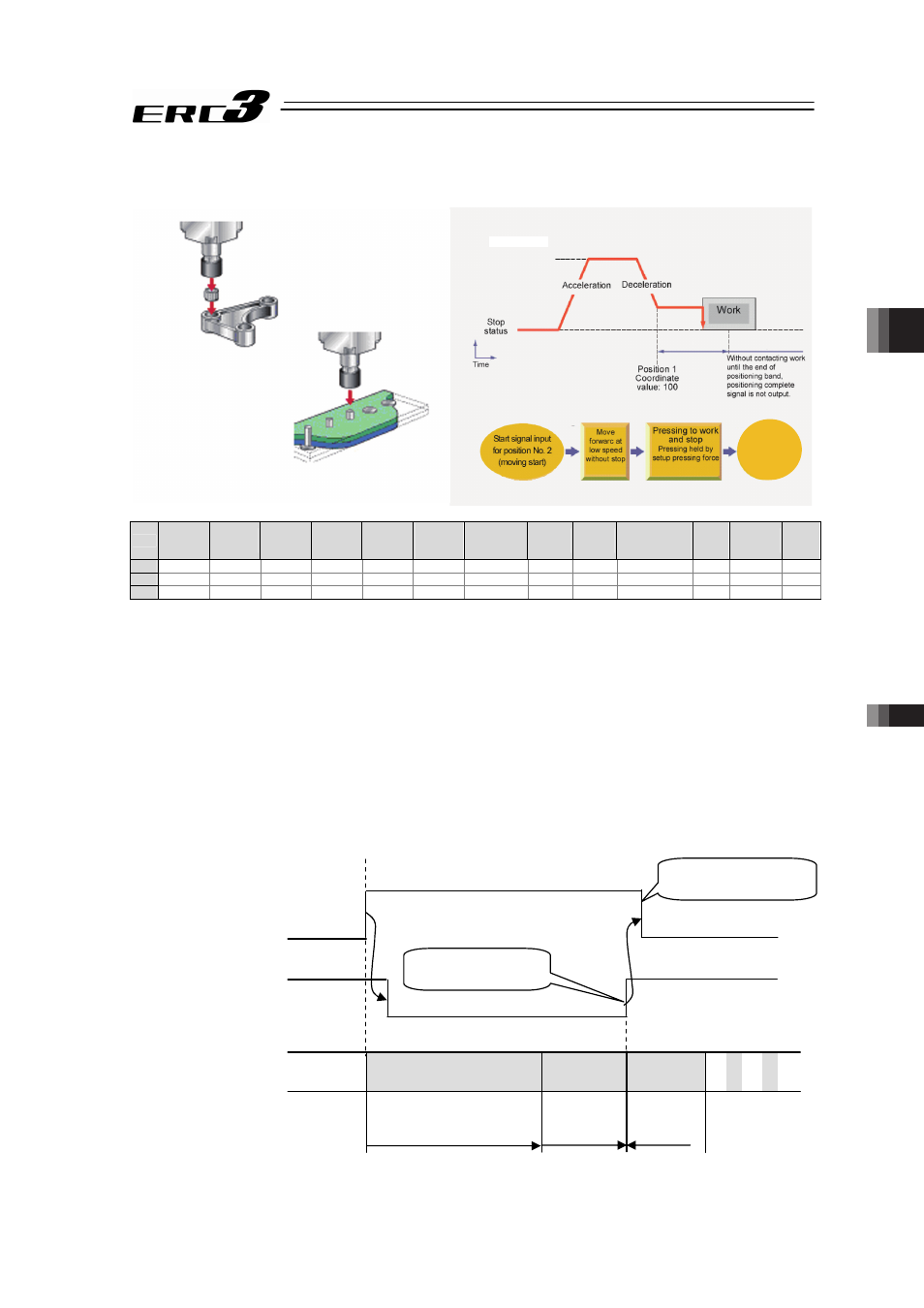
(3) Pressing operation
Sample use
No.
Position
[mm]
Velocity
[mm/s]
Accele-
ration
[G]
Decele-
ration
[G]
Pressing
[%]
Thresh-
old
[%]
Positioning
width
[mm]
Zone+
[mm]
Zone-
[mm]
Acceleration/
Deceleration
mode
Incre-
mental
Transported
load
Stop
mode
0
1
0.00
250.00
0.20
0.20
0
0
0.10
0.00
0.00
0
0
0
0
2
100.00
250.00
0.20
0.20
50
0
50.00
0.00
0.00
0
0
0
0
(Position No.2 sets pressing operation.)
Control method
1) The method of controlling the pressing operation is the same as that described in (1)
Positioning except the setting of the position table. Any setting of “Pressing” in the position
table allows the pressing operation to be done. “Positioning width” is assumed as pressing
operation distance.
2) The actuator moves at the setting speed and rating torque to the position of the coordinate
set in “Position” in the similar way as normal positioning. The operation is executed with the
value set in “Positioning width” for the amount of movement in the pressing operation, and
the torque (current limit) set in % in “Pressing” for the pressing operation as the upper limit.
Ԛ
Current Position No. PE* is output when the axis stops by pressing operation (pressing
complete). Also, even when not pressing a work piece (pressing error), a movement is
made for the setting of “positioning width”, and then turns ON.
Turned OFF by
turning PE* ON.
Turned ON even
in miss-pressing
Start signal
ST*
(PLCĺController)
Current position No.
PE*
(ControllerĺPLC)
Operation of actuator
Approach operation
Pressing
operation
Pressing
completion
Positioning by setting of
coordinate Value
Movement by
positioning
width
Stop of
pressing
Positioning
Completion
1)
2)
3)
4)
1)
3) 4)
2)
Positioning width 50
Velocity
Press-fitting process
Caulking process
250mm/sec