IAI America ERC3 User Manual
Page 321
Chapter 6
Adjustment of Operation
6.3 I/O Parameter
6.3.1 Positioner Mode 1, Positioner Mode 2 and Pulse
Train Control Mode
311
(5) Servo gain number (Parameter No.7)
No.
Name
Symbol
Unit
Input Range
Default factory setting
7
Servo gain number
PLGO
–
0 to 31
In accordance with
actuator
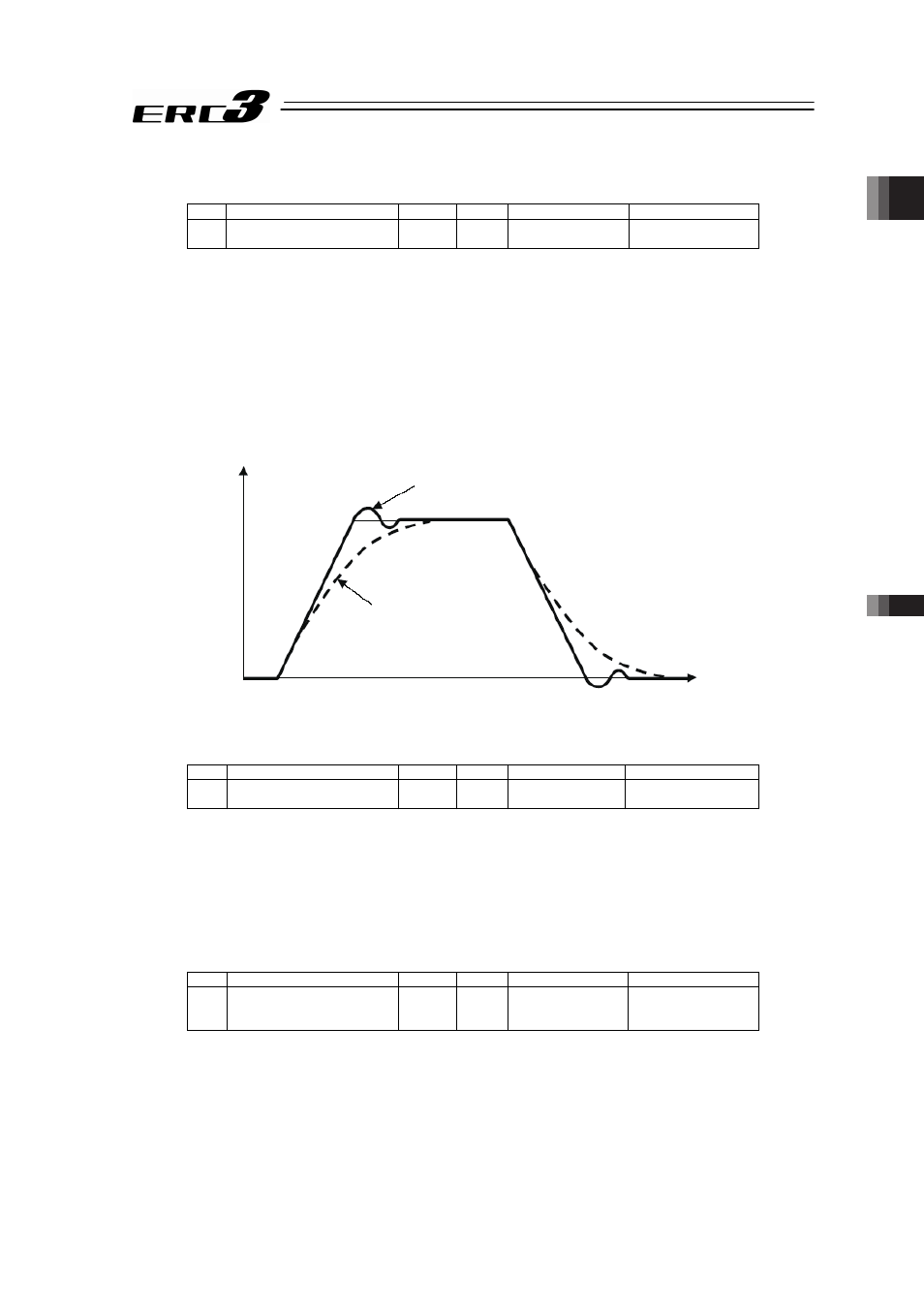
The servo gain is also called position loop gain or position control system proportion gain. The
parameter defines the response when a position control loop is used. Increasing the set value
improves the tracking performance with respect to the position command. However, increasing
the parameter value excessively increases the chances of overshooting.
When the set value is too low, the follow-up ability to the position command is degraded and it
takes longer time to complete the positioning.
For a system of low mechanical rigidity or low natural frequency (every object has its own
natural frequency), setting a large servo gain number may generate mechanical resonance,
which then cause not only vibrations and/or noises but also overload error to occur.
When the set value is high (over-shoot)
When the set value is low
Velocity
Time
(6) Default velocity (Parameter No.8)
No.
Name
Symbol
Unit
Input Range
Default factory setting
8
Default velocity
VCMD
mm/s 1 to Actuator’s
max. velocity
Rated actuator speed
The factory setting is the rated velocity of the actuator.
When a target position is set in an unregistered position table, the setting in this parameter is
automatically written in the applicable position number.
It is convenient to set the velocity often used.
(7) Default acceleration/deceleration (Parameter No.9)
No.
Name
Symbol
Unit
Input Range
Default factory setting
9
Default
acceleration/deceleration
ACMD
G
0.01 to actuator's
max. acceleration/
deceleration
Rated actuator's
acceleration/
deceleration
The factory setting is the rated acceleration/deceleration of the actuator.
When a target position is set in an unregistered position table, the setting in this parameter is
automatically written in the applicable position number.
It is convenient to set the acceleration/deceleration often used.