IAI America ERC3 User Manual
Page 249
Chapter 4 Operation
4.2 Operation in Positioner Mode
4.2.3 Operation in Positioner Mode 2 (Operation Using PIO Converter)
239
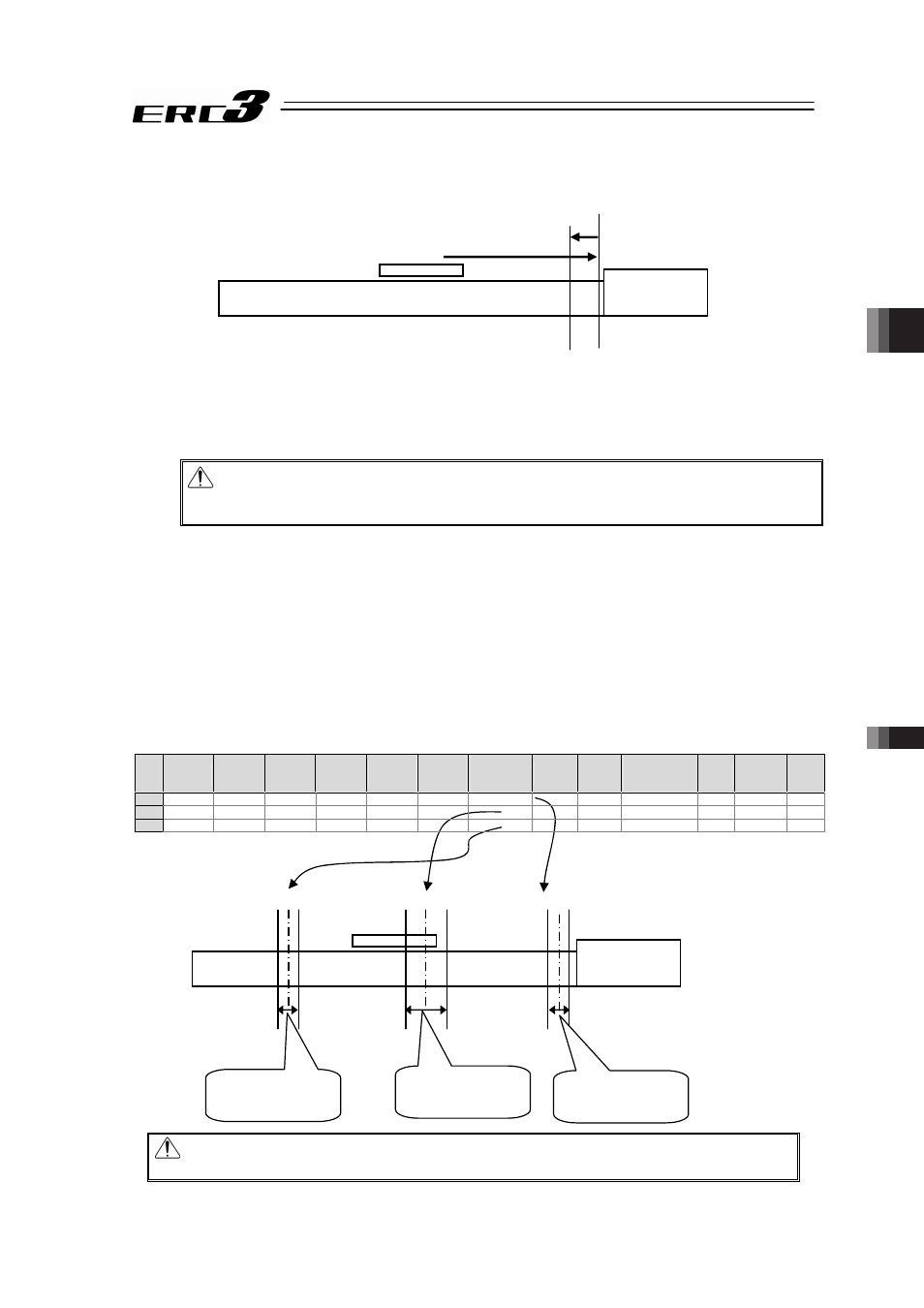
[Operation of Slider Type/Rod Type Actuator]
1) With the ST0 signal being ON, the actuator moves toward the mechanical end at the home
return speed.
The movement speed is 20mm/s.
2) The actuator is turned at the mechanical end and stopped at the home position. The
moving distance is the value set by Parameter No.22 “Home return offset level”.
Caution: In the home reverse specification, the actuator moves in the reverse direction.
Make sure to refer to 6.3.1 [2] (15) when a change to Parameter No.22 “Home
return offset level” is required.
(2) Features of LS signals (LS0 to 2)
The LS* signals are not complete signals for positioning commands such as those for other PIO
patterns. Despite the specified position No., the corresponding LS* signal is turned ON when
the actuator is entered into the setup value range as if the actuator were detected by a sensor
installed.
(Example) The figure below shows the position table and the position at which each of the LS
signals is turned ON. If the actuator passes any of the positioning widths in the
operation by another position number or manual operation in the servo OFF state,
the relevant LS signal is always turned ON.
Caution: LS* signal would not be output if the positioning width is set less than the
minimum resolution.
Mechanical end
Home
1)
2)
Home=0mm
70mm
150mm
LS0 is ON
0r5mm
LS1 is ON
70r10mm
LS2 is ON
150r5mm
No.
Position
[mm]
Velocity
[mm/s]
Accele-
ration
[G]
Decele-
ration
[G]
Pressing
[%]
Thresh-
old
[%]
Positioning
width
[mm]
Zone+
[mm]
Zone-
[mm]
Acceleration/
Deceleration
mode
Incre-
mental
Transported
load
Stop
mode
0
0.00
250.00
0.20
0.20
0
0
5.00
0.00
0.00
0
0
0
0
1
70.00
250.00
0.20
0.20
0
0
10.00
0.00
0.00
0
0
0
0
2
150.00
250.00
0.20
0.20
0
0
5.00
0.00
0.00
0
0
0
0