IAI America ERC3 User Manual
Page 319
Chapter 6
Adjustment of Operation
6.3 I/O Parameter
6.3.1 Positioner Mode 1, Positioner Mode 2 and Pulse
Train Control Mode
309
(2) Soft limit +, Soft limit - (Parameter No.3, No.4)
No.
Name
Symbol
Unit
Input Range
Default factory setting
3
Soft limit +
LIMM
mm
-9999.99 to
9999.99
Actual stroke on +
side
4
Soft limit -
LIML
mm
-9999.99 to
9999.99
Actual stroke on - side
0.3mm (deg) is added to the outside of the effective actuator stroke for the setting at the
delivery (since there would be an error at the end of effective stroke if set to 0). Adjustment can
be made freely within the movable range considering the suitability to the system for purposes
of avoidance to interference, crash, etc. Adjust the setting referring the figure below if
necessary.
The operational range for jog and inching after the home return is 0.2mm less than the set value.
Therefore, in case that it is necessary to have jog or inching operation up to the end of the
stroke, set to the value extended by 0.3mm from the end of the stroke considering 0.1mm
margin to correspond to load inertia.
An incorrect soft limit setting will cause the actuator to collide into the mechanical end, so
exercise sufficient caution.
The minimum setting unit is 0.01mm.
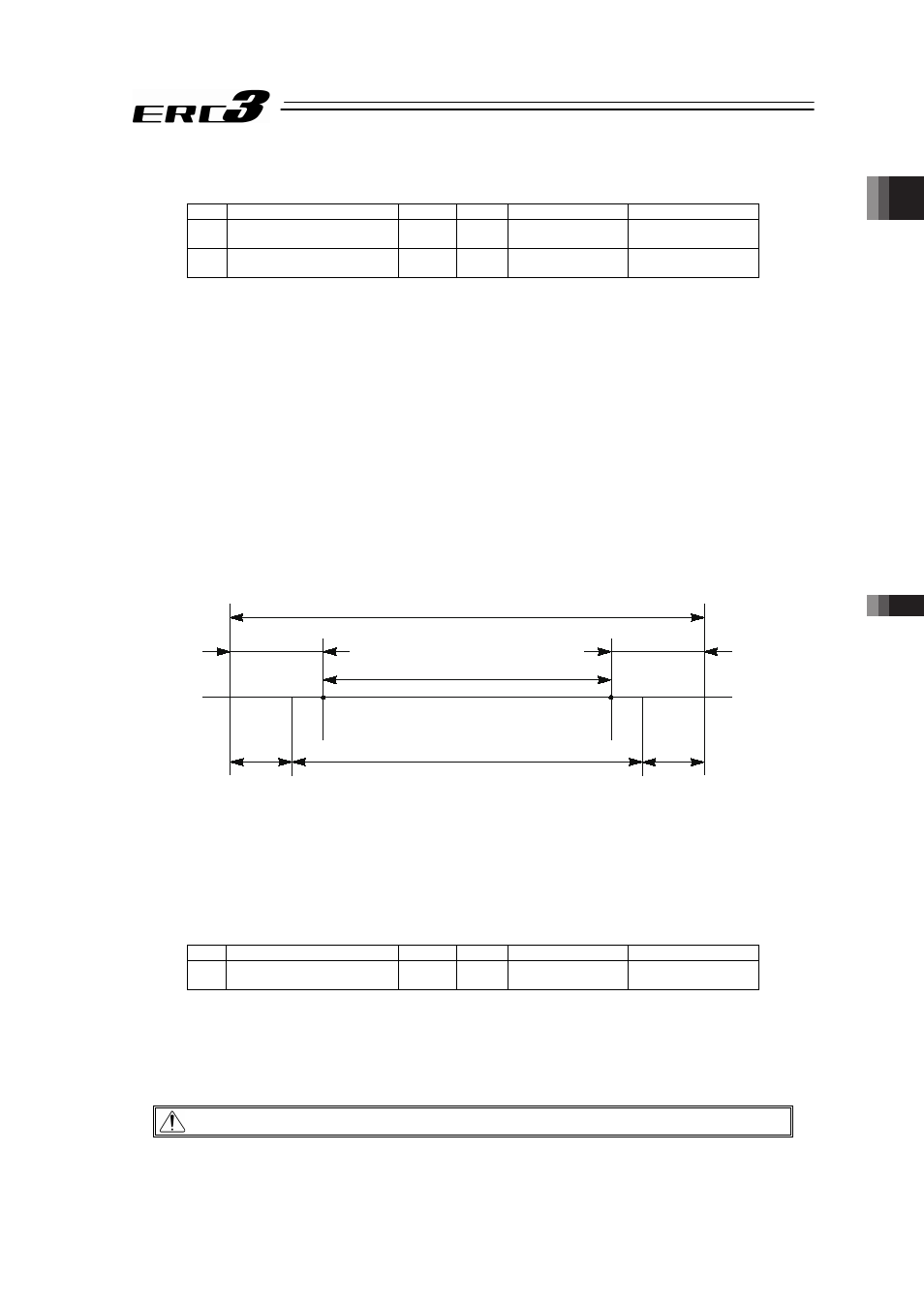
Example) Set the effective stroke to between 0mm and 80mm
Parameter No.3 (positive side) 80.3
Parameter No.4 (negative side) -0.3
Soft limits set in the parameter
Approx. 0.3mm
Approx. 0.3mm
Stroke to be used
0
8 0
0.2mm
0.2mm
Allowable jogging/inching range after home return
Alarm Code 0D9 “Soft Limit Over Error” will be generated when the set value exceeded the
value (0 when shipped out) set in Parameter No.88 “Software Limit Margin”. Unless setting is
established in Parameter No.88 (setting at delivery is 0), the setting in this parameter will be the
threshold for Alarm Code 09D “Soft Limit Over Error”.
(3) Home return direction (Parameter No.5)
No.
Name
Symbol
Unit
Input Range
Default factory setting
5
Home return direction
ORG
–
0: Reverse
1: Forward
In accordance with
actuator
Unless there is an indication of home-reversed type (option), the direction of the home return for
the straight axis is located on the motor side. [Refer to the coordinate system of the actuator.]
If it becomes necessary to reverse the home direction after the actuator is installed on the
machine, change the setting.
Caution: The home direction cannot be changed for the rod type actuators.