IAI America ERC3 User Manual
Page 212
Chapter 4 Operation
4.2 Operation in Positioner Mode
4.2.3 Operation in Positioner Mode 2 (Operation Using PIO Converter)
202
(3) Home Return (HOME, HEND, PEND, MOVE)
Input
Output
PIO signal
HOME
HEND
PEND
MOVE
Patterns 0 to 1
{
{
{
{
Patterns 2 to 4
{
{
{
u
Pattern 5
u
(Note 1)
{
u
u
{
: Available, u: Unavailable
Note 1 Pattern 5 cannot make a home return with HOME signal. Refer to 4.2.3 [8] (1) for how
to perform a home-return operation.
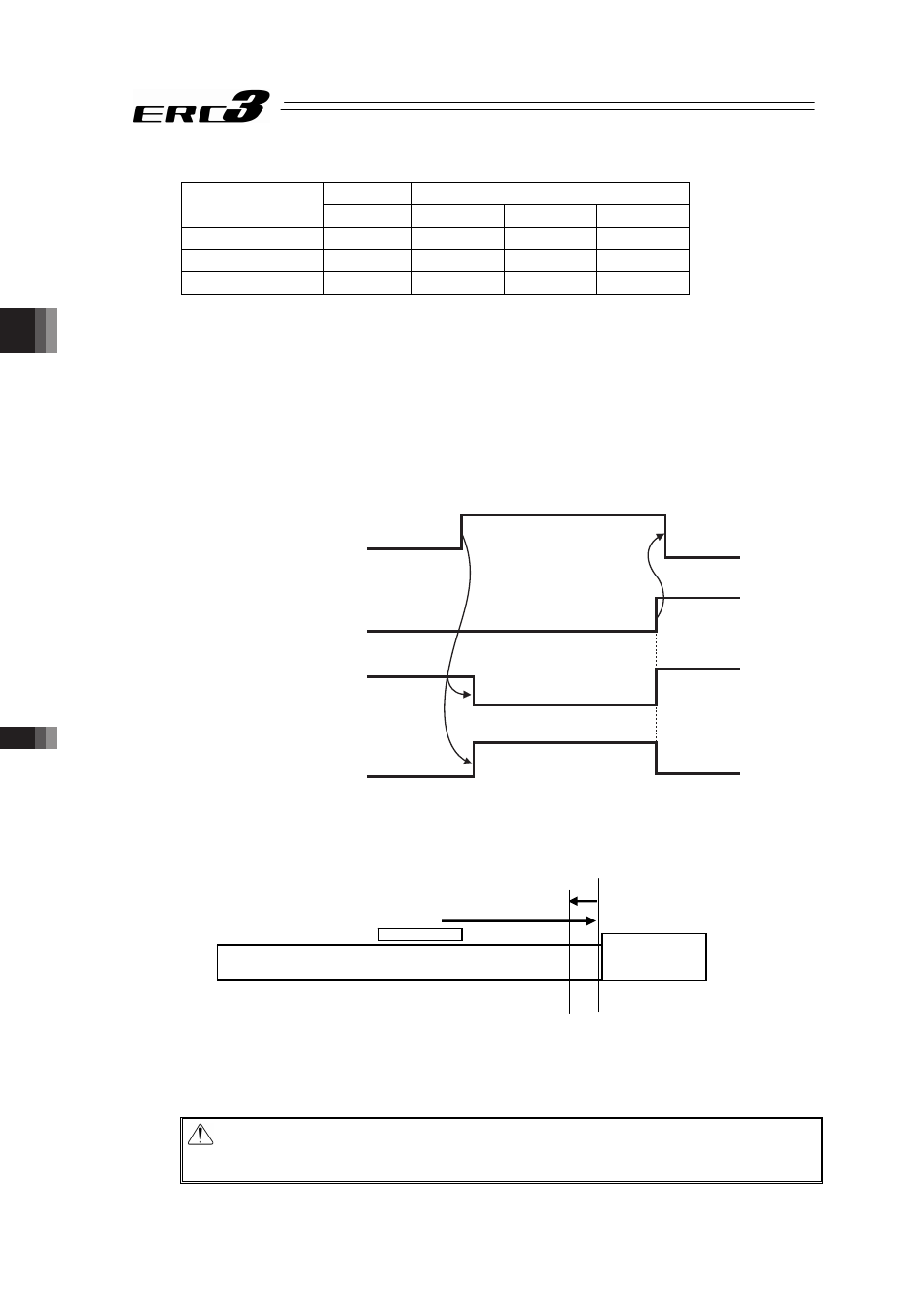
The HOME signal is intended for automatic home return. The HOME signal is caught at the
rising edge (ON edge) to start the home return. At completion of the home return, home return
completion signal HEND is turned ON. The home-return complete signal HEND is kept ON
unless the memory of origin point is lost for a reason such as alarm. During the home return
operation, positioning completion signal PEND and moving signal MOVE are set to OFF and
ON, respectively.
Homing Completion Signal
HEND
(Controller→PLC)
Positioning Completion Signal
PEND
(Controller→PLC)
Moving Signal
MOVE
(Controller→PLC)
Home Return Signal
HOME
(PLC→Controller)
[Operation of Actuator]
1) With the HOME signal being ON, the actuator moves toward the mechanical end at the
home return speed. The movement speed is 20mm/s.
2) The actuator is turned at the mechanical end and stopped at the home position. The
moving distance is the value set by Parameter No.22 “Home return offset level”.
Caution: In the home reverse specification, the actuator moves in the reverse direction.
Make sure to refer to Chapter 7 Parameter when a change to Parameter
No.22 “Home return offset level”.
Mechanical end
Home
1)
2)