IAI America ERC3 User Manual
Page 270
Chapter 4 Operation
4.4 Operation in MEC Mode 1 and 2 (Operation with PLC)
260
[2] Table for Operational Conditions (Position Table) and Positioning Complete Signal
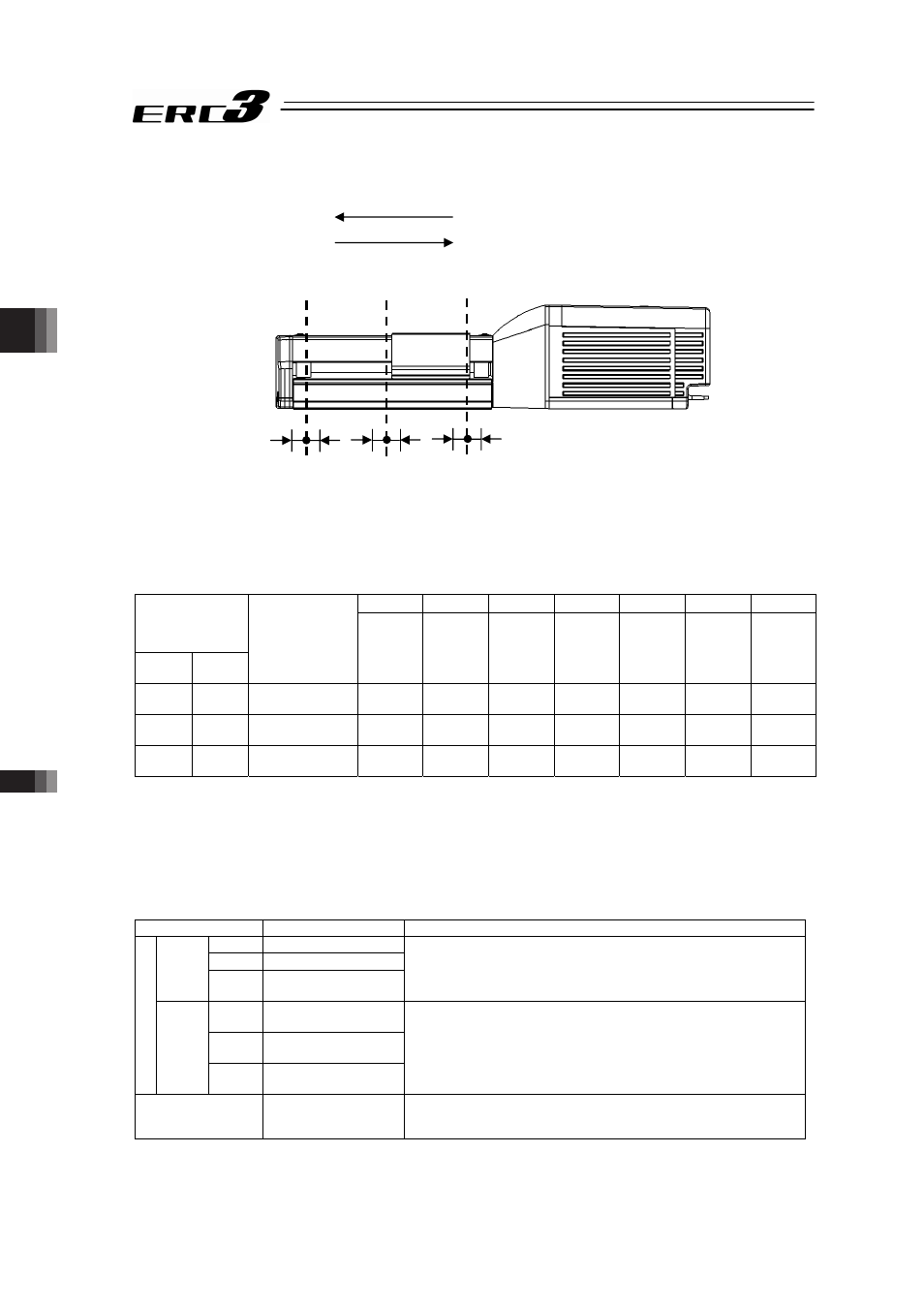
1)
2) 3)
4) 5)
6)
1) to 6) = Parameter No.1 (Positioning width)
Ŷ Operation Condition Table (Position Table)
1)
2)
3)
4)
5)
6)
7)
Used PIO (input
and output) Signal
2-point
stop
3-point
stop
Stop position
Note 2
Position
[mm]
Speed
[mm/s]
Acceleration
[G]
Deceleration
[G]
Push force
[%]
Push width
[mm]
Energy-
Saving
Function
ST0
ʊʊ
Note 1
ST0
Start point
(Forward)
10.00
50.00
0.1
0.1
0
0
Enabled
–
ST0, ST1 Intermediate point
(Intermediate)
50.00
50.00
0.1
0.1
70
1.00
Enabled
ST0
Note 1
ST1
End point
(Backward)
100.00
50.00
0.1
0.1
0
0
Enabled
Note 1 ST0 for 2-point stop is end point move when it is ON, and start point move when OFF.
Note 2 The start point of SEP-PT is expressed as “Backward End Position”, end point as “Forward
End Position” and intermediate point as “Intermediate Position”.
Ŷ Position Detection Output and Positioning Complete Signal
Content of the output signal is determined by the setting of the operation pattern (whether to
use the pressing operation).
Signal Name
Contents of Signals
Function
LS0
Start Point Detection
LS1
End Point Detection
Not
used
LS2
Intermediate Point
Detection
The same operation as of the sensor of the air cylinder is performed.
Turns ON when the current position is in the range of positioning band to
each target position set in Parameter No. 1. (Refer to the figure below.)
PE0
Start Point Positioning
Complete
PE1
End Point Positioning
Complete
P
re
ss
in
g F
un
ct
io
n
Use
PE2
Intermediate Point
Positioning Complete
It turns ON when the pressing or the positioning is complete.
(It also turns ON even with a miss-operation.)
It turns OFF with a movement signal to another point.
HEND
Home Return
Completion
This signal is turned ON when the home return operation is completed.
This signal will not exist when 3-point stop (3-point positioning) is
selected as the operation pattern.
End point
Intermediate
point
Start point
Approach
Return
LS1
PE1
LS3
PE3
LS0
PE0