Pid calculator, Caution – Basler Electric DECS-250N User Manual
Page 118
102
9440500990 Rev D
Stability Tuning
DECS-250N
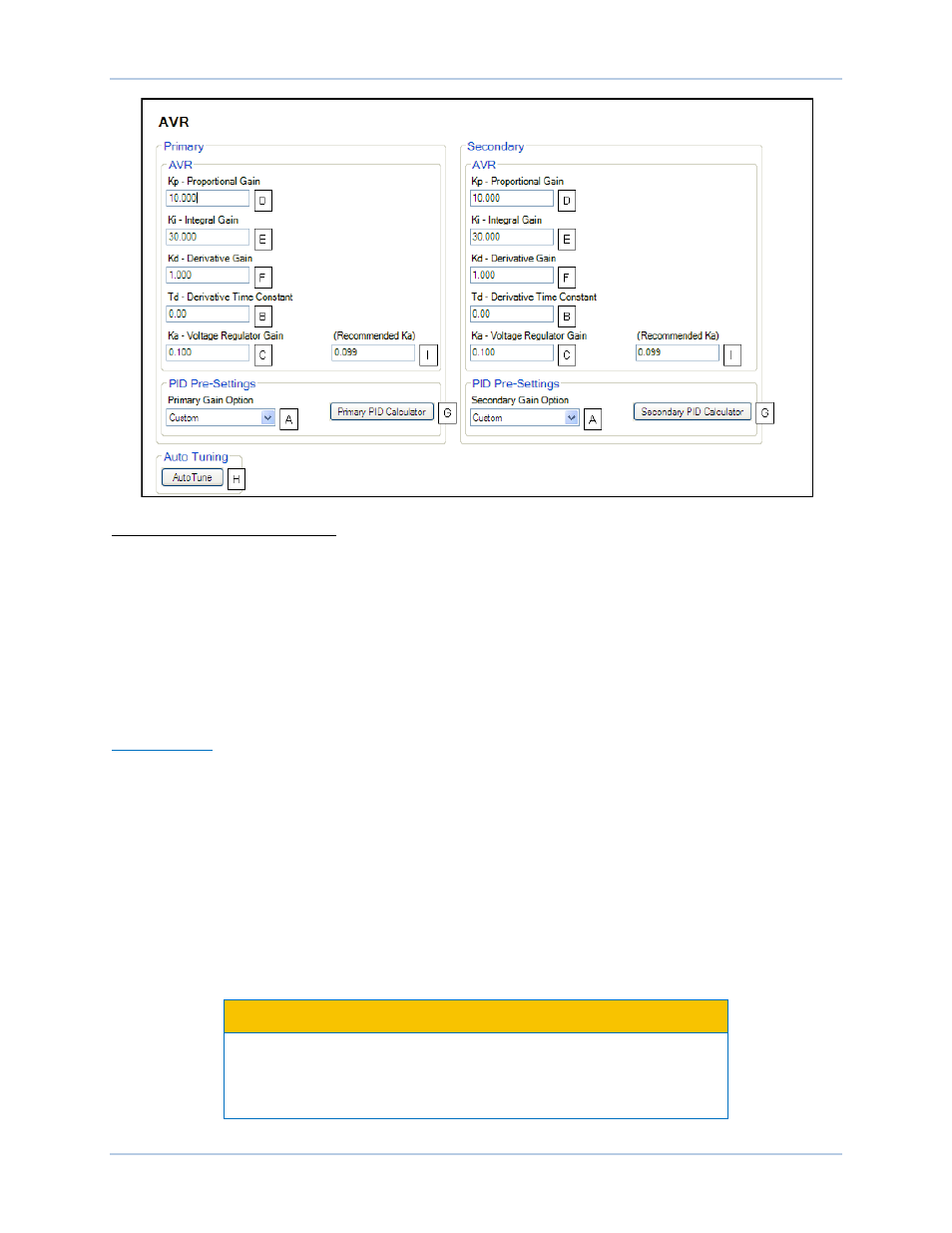
Figure 98. AVR Stability Settings
A
Gain Option: Select T'do=1.0 Te=0.17, T'do=1.5 Te=0.25, T'do=2.0 Te=0.33, T'do=2.5 Te=0.42,
T'do=3.0 Te=0.50, T'do=3.5 Te=0.58, T'do=4.0 Te=0.67, T'do=4.5 Te=0.75, T'do=5.0 Te=0.83, T'do=5.5
Te=0.92, T'do=6.0 Te=1.00, T'do=6.5 Te=1.08, T'do=7.0 Te=1.17, T'do=7.5 Te=1.25, T'do=8.0 Te=1.33,
T'do=8.5 Te=1.42, T'do=9.0 Te=1.50, T'do=9.5 Te=1.58, T'do=10.0 Te=1.67, T'do=10.5 Te=1.75, or
Custom.
B
Td – AVR Derivative Time Constant: Adjustable from 0 to 1 in 0.01 increments.
C
Ka – Voltage Regulator Gain: Adjustable from 0 to 1 in 0.001 increments.
D
Kp – Proportional Gain: Adjustable from 0 to 1,000 in 0.001 increments.
E
Ki – Integral Gain: Adjustable from 0 to 1,000 in 0.001 increments.
F
Kd – Derivative Gain: Adjustable from 0 to 1,000 in 0.001 increments.
PID Calculator
The PID calculator is accessed by clicking the PID calculator button (Figure 98, locator G) and is available
only when the primary gain option is “Custom”. The PID calculator (Figure 99) calculates the gain
parameters Kp
A
, Ki
B
, and Kd
C
based on the generator time constants (T’do)
D
and exciter time constant
(Te)
E
. If the exciter time constant is not known, it can be forced to the default value
F
which is the generator
time constant divided by six. A derivative time constant (Td)
G
setting field enables the removal of noise
effects on numerical differentiation. A voltage regulator gain (Ka)
H
setting field sets the voltage regulator
gain level of the PID algorithm. Calculated and entered parameters can be applied
I
upon closure
J
of the
PID calculator.
Generator information
K
appears in the PID Record List where records can be added
L
or removed
M
.
A group of settings can be saved with a unique name and added to a list of gain setting records available
for application. Upon completion of stability tuning, undesired records can be removed from the record
list.
Caution
Calculated or user-defined PID values are to be implemented only
after their suitability for the application has been verified by the user.
Incorrect PID numbers can result in poor system performance or
equipment damage.