Metrohm 900 Touch Control Manual User Manual
Page 112
11.5 USB Sample Processor
■■■■■■■■■■■■■■■■■■■■■■
96
■■■■■■■■
900 Touch Control
Input range
0 - 'Maximum stroke path' mm
Default value
0 mm
A lift position of 0 mm corresponds to the "home
position", i.e. the lift is located at the upper stop
position. The maximum stroke path is defined in the
properties of the tower (see "Maximum stroke
path", page 93).
Swing increment
Amount by which the robotic arm can be swung relative to its current
position. This parameter is used in the command MOVE for the settings
Destination = swing + and swing -.
Input range
0.00 - 180.00 °
Default value
10.00 °
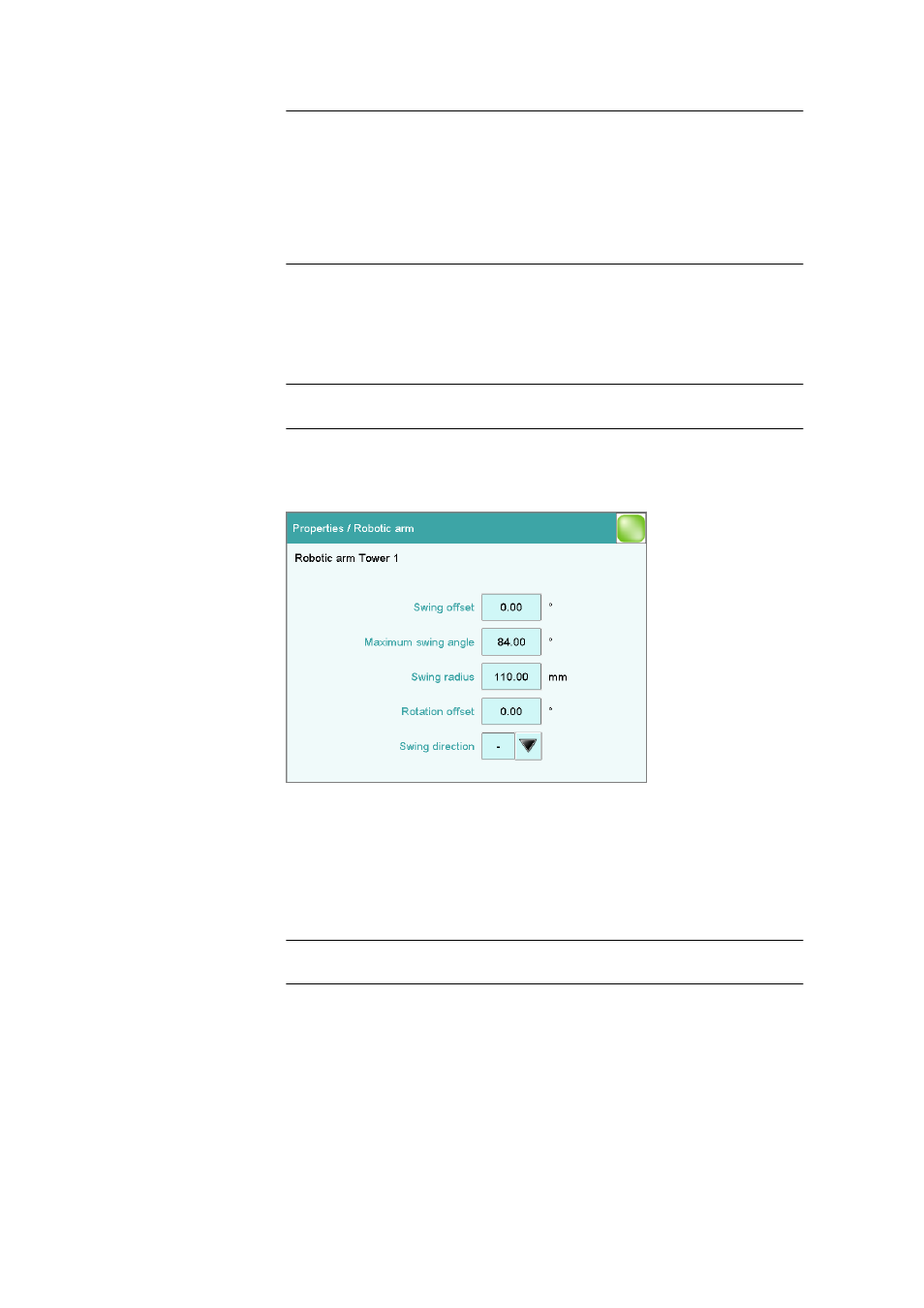
Properties – Robotic arm
Swing Head: Properties
▶ Robotic arm
Properties of the robotic arm can be defined in the dialog Properties /
Robotic arm.
Swing offset
The swing offset is a physical angle offset of a specific robotic arm model.
The required values can be found in the leaflet for the robotic arm.
Input range
–270.00 - 270.00 °
Default value
0.00 °
Maximum swing angle
Useable swing range of the robotic arm. Each robotic arm model displays
a different value on the basis of its construction. The range can also be
reduced if necessary. You will find the required values in the leaflet for the
robotic arm.