Pid/alarm, Pid/alarm -19, Index – Yokogawa DAQWORX User Manual
Page 276
8-19
IM WX104-01E
1
2
3
4
5
6
7
8
9
Index
Conf
gur
ng the CX1000/CX2000
Exp.
Enter the retransmission expression.
Output Span
Set the maximum value, minimum value, decimal point position (0 to 4), and unit (up to 6
alphanumeric characters).
Set the maximum and minimum values between –30000 to 30000. The maximum value
must be greater than the minimum value and the difference between the two must be
less than or equal to 30000.
Math Error
Set whether to set the value to overrange value or underrange value when the computed
result is in error.
Constant
Set the constants used for PV/SP math, retransmission math, and logic math.
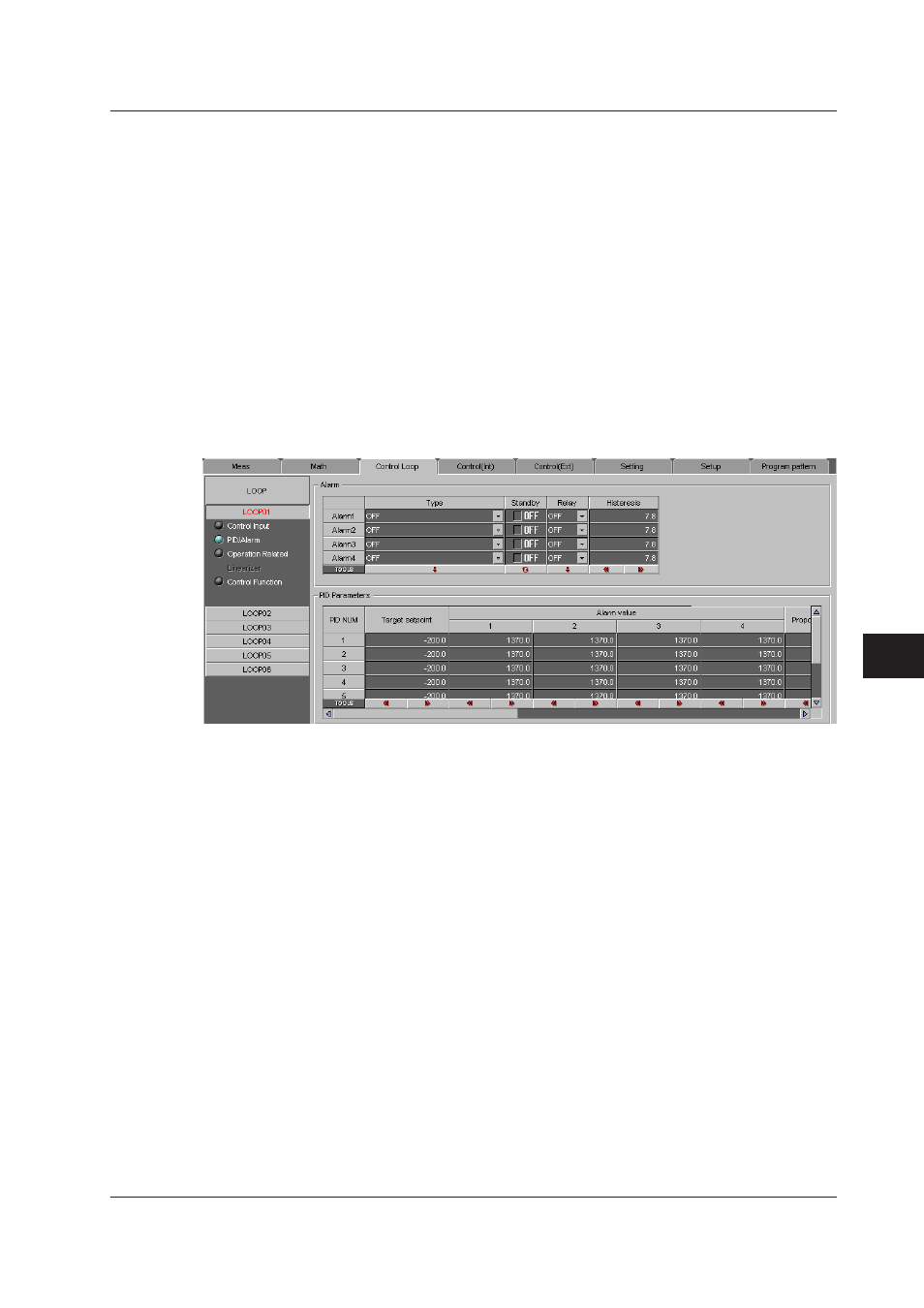
PID/Alarm
• Alarm
Specify an alarm for each loop.
Type
Select the type of alarm from the following:
[PV-High], [PV-Low], [Deviation-High], [Deviation-Low], [Deviation-H&L], [Dev-within-
H&L], [SP-High], [SP-Low], [Output-High], and [Output-Low].
Standby
Activate or deactivate standby.
For details about the alarms that can be turned on or off, refer to the CX User’s
Manual (IM 04L31A01-01E or IM 04L31A01-03E).
Relay
Select the type of relay.
DO001 to DO006: Loop 2
DO101 to DO106: Loop 4 (Only on the CX2000)
DO201 to DO206: Loop 6 (only on the CX2000 whose 6/4LOOP Select is set to 6)
RO001 to RO012: Control expansion DIO (only on the CX2000 that has the control
expansion DIO installed)
SW001 to SW036: Internal switch (SW001 to SW018 on the CX1000, Style 3 or later)
Hysteresis
Specify the alarm hysteresis in EUS (0.0 to 10.0%).
8.4 Control Functon General Settngs