6 moving to/from machine home – Rockwell Automation 8520 9/Series CNC Lathe User Manual
Page 533
Tool Tip Radius Compensation (TTRC)
Function
Chapter 21
21-49
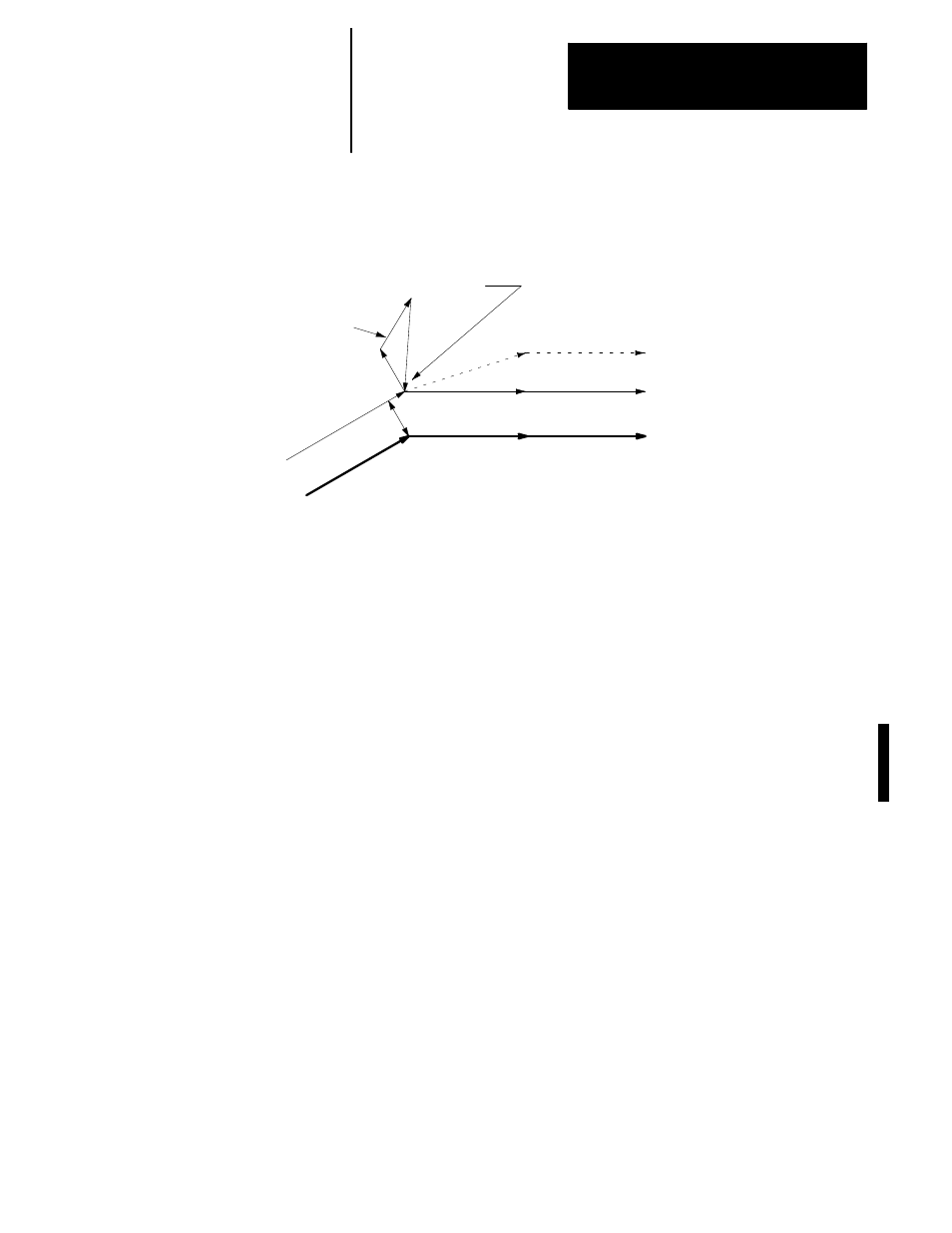
Figure 21.44
Cutter Compensation Re-Initialized after a Manual or MDI Operation.
Manually jog axes (or any MDI
execution) and return to the
compensated path.
Cutter Compensation is re-initialized here. The control assumes that the
current position is a programmed position at the point of re-initialization.
Consequently, after the initialization, tool compensation is offset by twice the
tool radius.
Tool Radius
Over Compensated Path
(after MDI/Manual Interrupt)
Original Compensated Path
(had no interruption occurred)
Programmed Path
Use the Jog Retract feature if you must jog the axes away from a
compensated path. Jog retract prevents the overcompensation from
occurring.
If you interrupt cutter compensation with a manual or MDI operation and
the next programmed block is a circular block, the control generates an
error when it tries to re-initialize cutter compensation. You can avoid this
by using the jog retract feature instead of manual or MDI when you need
to interrupt cutter compensation.
Unless Cutter Compensation is active, when a program recover is
performed, the control automatically returns the program to the beginning
of the block that was interrupted. In the case of power failure, the control
will even reselect the program that was active prior to the interruption.
We recommend that you cancel TTRC by using a G40 command before
executing a return to, or from, machine home, or a return to or from the
secondary machine home. This refers to the operations performed when
the control executes either the G28, G29, or G30 commands as described
in chapter 14.
If compensation is not cancelled by using a G40 command, the control
automatically, temporarily cancels compensation for the return to machine
home or secondary machine home operations. This done by using the
move to the intermediate point, as designated when the operation was
performed, as an exit move for compensation.
Important: An intermediate point should always be programmed for a
return to home operation if TTRC is active. If no intermediate point is
21.6.6
Moving To/From Machine
Home