Rockwell Automation 8520 9/Series CNC Lathe User Manual
Page 502
Tool Tip Radius Compensation (TTRC)
Function
Chapter 21
21-18
The I- and K-words in the exit move block define a vector that is used by
the control to redefine the end-point of the previously compensated move.
I- and K-words are always programmed as incremental values regardless of
the current mode (G90 or G91).
The vector defined by the I- and/or K-words is along a line drawn from the
end-point of the programmed path to a point referenced from the end-point
of the programmed path a distance along the axes in the current plane an
amount as designated with the I- and/or K-words. A new vector is then
defined parallel to the vector defined by the I- and/or K-word and offset
from this vector in the direction and amount of the currently active offset
(G41 or G42). The intersection of this new vector with the current
compensated tool path defines a point which is the new end-point of the
last programmed compensated move.
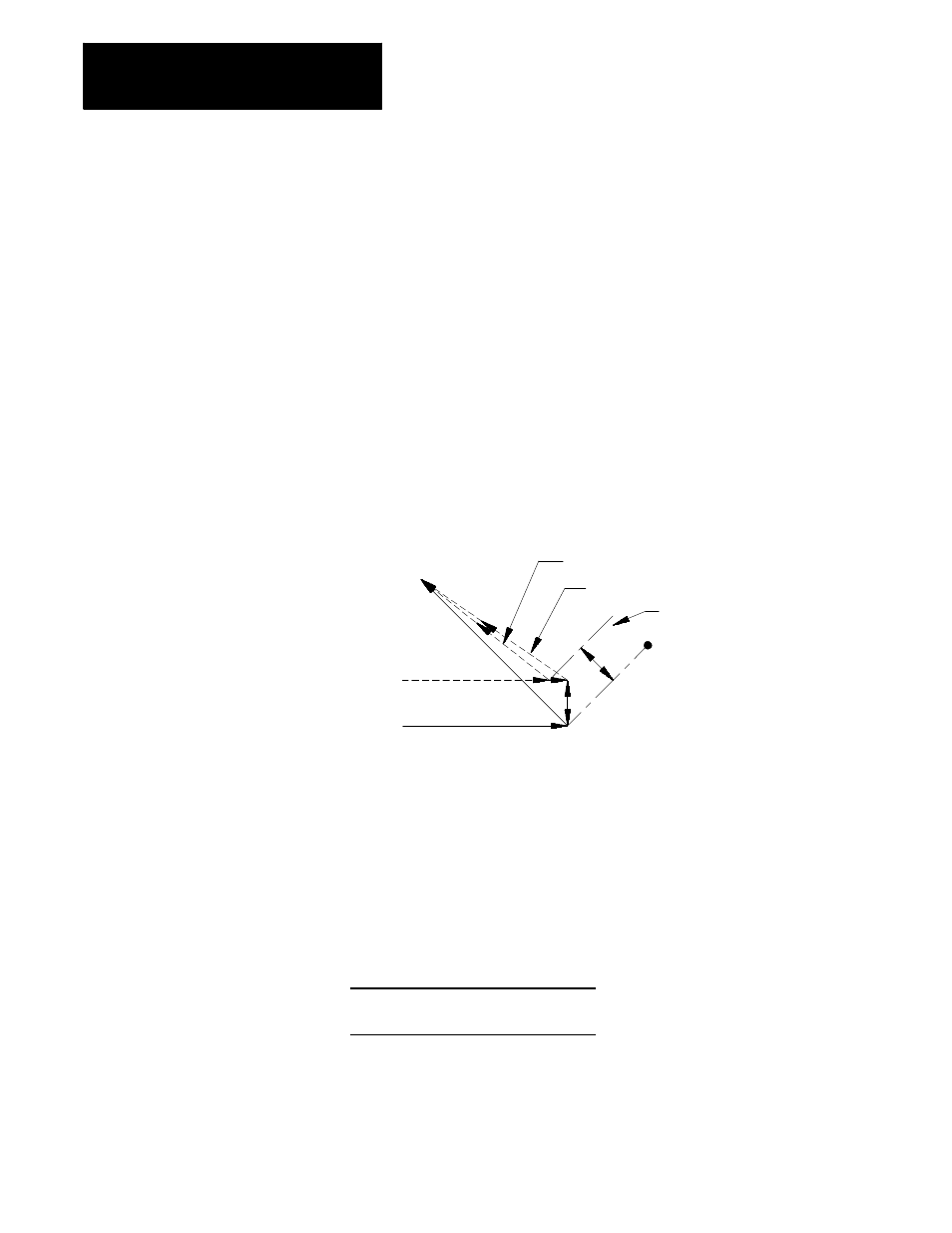
Figure 21.13
Exit Move Defined By An I, K Vector
Compensated path using I, K vector
Compensated path if no I, K in G40 block
Intercept line
I, K
r
r
Compensated path
Programmed path
Figure 21.13 is the exception. The change in length of the compensated
path is more than one radius of the tool. In this special case, this offset is
limited to one radius of the tool. The direction of the offset is towards the
point of intersection of the I K vector and the current compensated tool
path.
Example 21.6
Exit Move Defined By An I,K Vector But Limited To Tool Radius
Assume T1 radius is 3
N10 Z10.G41T1
N11 X10.Z2.I3K-10.G40;