1 internal interfaces, Internal interfaces, 8basic drive functions (mck) – Lenze 8400 HighLine User Manual
Page 598
8
Basic drive functions (MCK)
8.12
Holding brake control
598
Lenze · 8400 HighLine · Referenzhandbuch · DMS 10.0 EN · 06/2014 · TD05/TD14
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
8.12.1
Internal interfaces
In the function block editor, the
system block provides the following
internal interfaces for the basic function "holding brake control":
Inputs
Identifier
Data type
Information/possible settings
bMBrakeRelease
BOOL
Releasing/applying the brake in connection with the selected operating mode
FALSE Apply brake.
• During automatic operation, the internal brake logic controls the
brake.
TRUE Release brake manually (forced release).
• Note!
The brake can also be released if the controller is inhibited!
• During automatic operation, the internal brake logic is
deactivated and the brake is released (supervisor operation). If a
controller inhibit has been set by the brake control, it will be
deactivated.
• In semi-automatic operation, the brake is released including
feedforward control.
bMBrakeStartValue2
BOOL
(from version 06.00.00)
Selection of the torque feedforward control value
Feedforward control of the motor before release
FALSE Starting value 1 is active (see the following figure).
TRUE Starting value 2 is active (see the following figure).
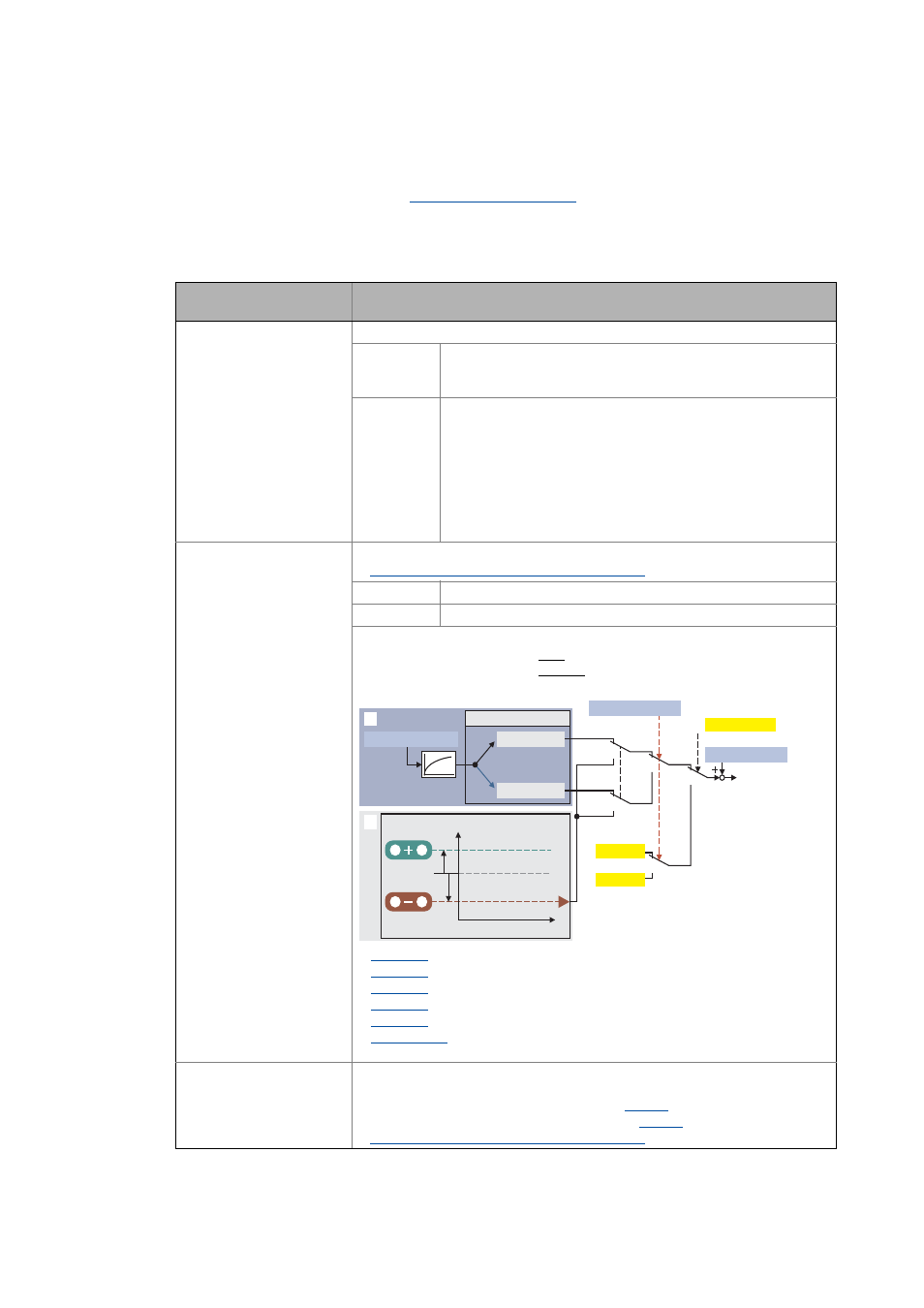
Creation of the feedforward control value for the release process of the brake:
Signal path for motor control with feedback
Signal path for motor control without feedback
Feedforward control value
: Switching threshold
: Hysteresis for release
: Hysteresis for application
: Starting value 1 for manual feedforward control
: Starting value 2 for manual feedforward control
: Selection of the feedforward control value (automatic/manual
selection)
nMBrakeAddValue_a
INT
(from version 06.00.00)
Additive feedforward control value (speed or torque) in [%] for torque feedforward
control when the respective control mode is started
• For speed control: 100 % ≡ reference speed (
)
• For torque control: 100 % ≡ maximum torque (
)
Feedforward control of the motor before release
0
t
nSpeedSetValue_a
Release brake
Close brake
bBrakeStartValue2
TorqueValue2
(+)nSetSpeed
(-)nSetSpeed
C02581/4
C02581/5
0
2
TorqueValue1
C02582 - Bit 4
nBrkAddValue_a
nMotorTorqueAct_a
T = 4 ms
S&H (Retain)
1
0
0
1
1