7technology applications – Lenze 8400 HighLine User Manual
Page 437
Lenze · 8400 HighLine · Referenzhandbuch · DMS 10.0 EN · 06/2014 · TD05/TD14
437
7
Technology applications
7.4
TA "Table positioning"
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
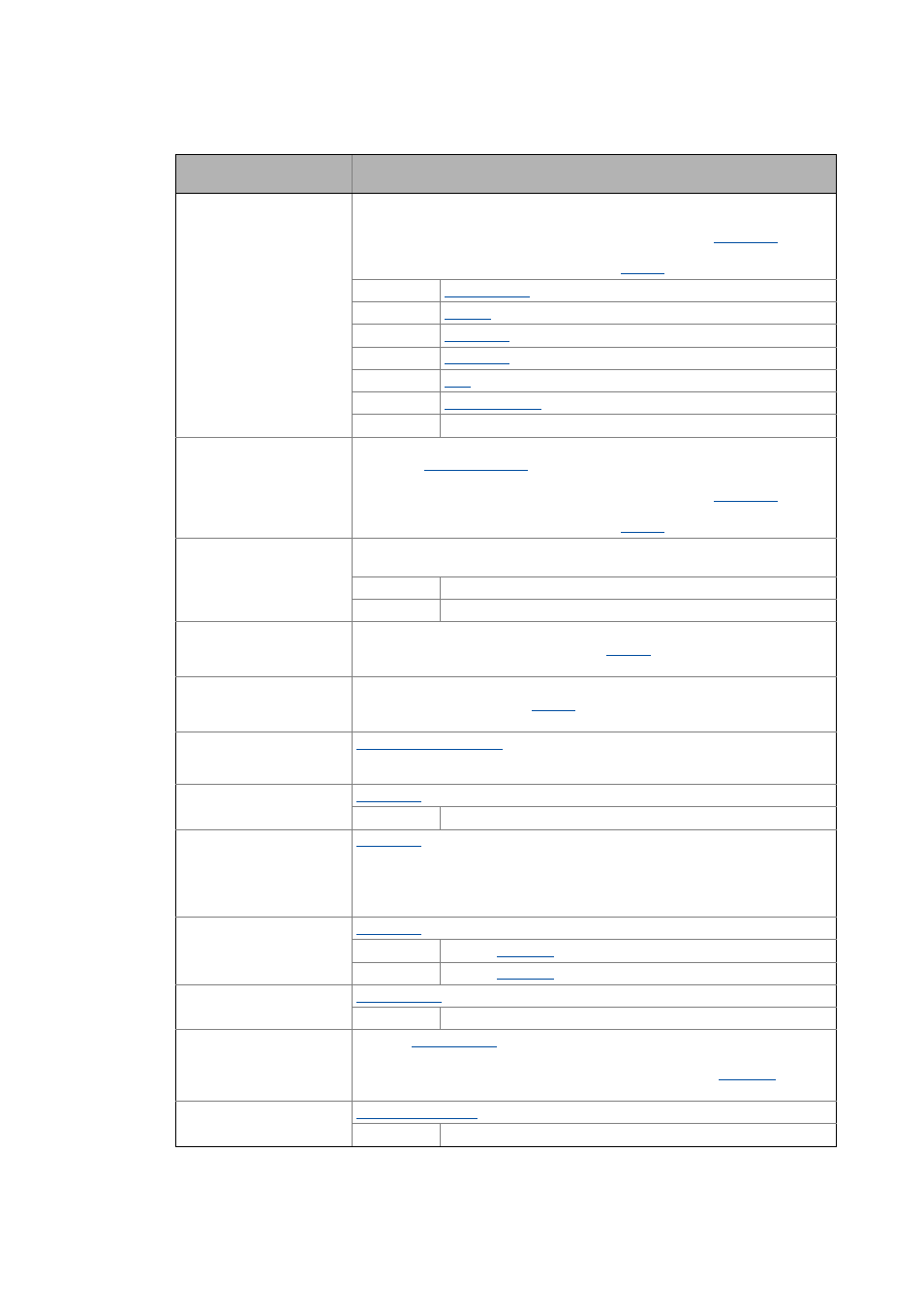
wMckOperationMode
WORD
Selection of the operating mode of the Motion Control Kernel
• Only bit 0 ... bit 3 of wMckOperationMode is evaluated.
• If an invalid operating mode is selected, the response set in
is
activated (Lenze setting: "Warning").
• The current operating mode is displayed in
.
0
1
2
3
4
5
6 ... 15 Reserved for future extensions
bMckOperationMode_1
...
bMckOperationMode_8
BOOLBOOL
Binary-coded selection of the operating mode of the Motion Control Kernel
• See the "
" chapter for a detailed description of the individual
control bits.
• If an invalid operating mode is selected, the response set in
is
activated (Lenze setting: "Warning").
• The current operating mode is displayed in
.
bPosCtrlOn
BOOL
Position control/Angle control
• Pre-configured assignment: TRUE (position control active)
FALSE Deactivate position control/angle control
TRUE Activate position control/angle control
nPosCtrlOutLimit_a
INT
Limitation of the position controller output
• Scaling: 16384 ≡ 100 % reference speed (
• Pre-configured assignment: 100 %
nPosCtrlPAdapt_a
INT
Adaptation of the position controller gain
• Scaling: 16384 ≡ 100 % Vp (
)
• Pre-configured assignment: 100 %
bLimitSwitchPos
bLimitSwitchNeg
BOOL
: Inputs for positive/negative limit switch
bReleaseLimitSwitch
BOOL
: Retract operated limit switch
TRUE Retract operated limit switch (in opposite direction)
bManJogPos
bManJogNeg
BOOL
:
bManJogPos = TRUE: Manual jog right
bManJogNeg = TRUE: Manual jog left
Both inputs = TRUE: No change compared to previous state
Both inputs = FALSE: Stop manual jog
bManJogExecute2ndVel
BOOL
: Changeover to speed 2
FALSE Speed 1 (
TRUE Speed 2 (
bEnableSpeedOverride
BOOL
TRUE Activate speed override
nSpeedOverride_a
INT
• Percentage multiplier for the currently active speed.
• 16384 ≡ 100 % of the maximum traversing speed (display in
).
• If the override value is 0 %, the drive is brought to a standstill.
bEnableAccOverride
BOOL
TRUE Activate acceleration override
Identifier
Data type
Information/possible settings