5motor control (mctrl) – Lenze 8400 HighLine User Manual
Page 310
5
Motor control (MCTRL)
5.15
Internal interfaces | System block "LS_MotorInterface"
310
Lenze · 8400 HighLine · Referenzhandbuch · DMS 10.0 EN · 06/2014 · TD05/TD14
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
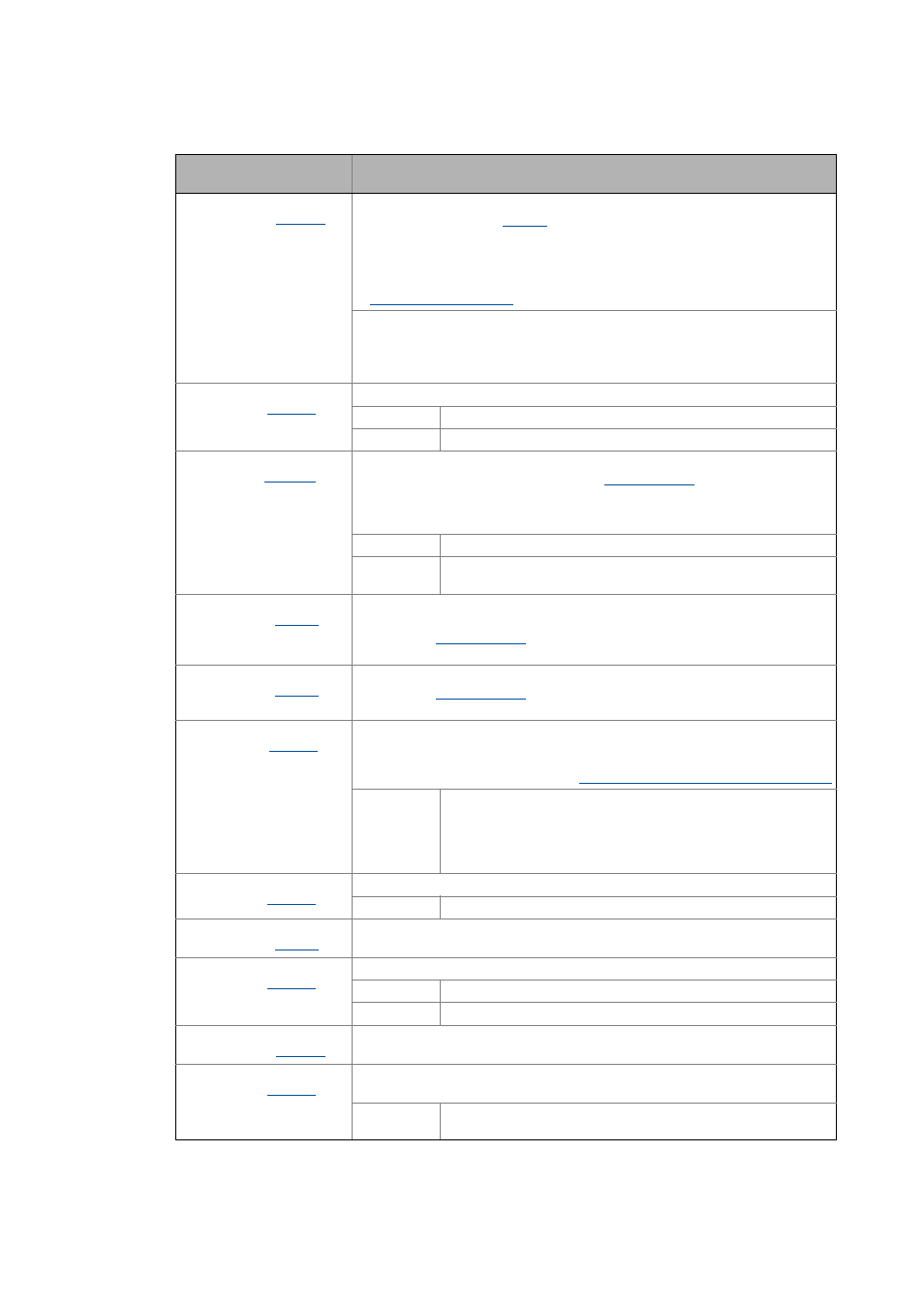
nBoost_a
| INT
Process signal for the V
min
boost
and has thus an increasing or decreasing effect.
• This signal serves to implement a load-dependent Vmin boost to improve the
torque behaviour in different load states, as for instance in case of operation in
generator or motor mode.
• Scaling: 16384 ≡ 100 % rated device voltage V
FU
(400 V or 230 V)
Adapting the Vmin boost ( 163)
Stop!
Values selected too high may cause the motor to heat up due to the resulting
current!
bPosCtrlOn
| BOOL
Position/angle control
FALSE Deactivate position/angle control.
TRUE Activate position/angle control.
bDeltaPosOn
| BOOL
Activate position difference as setpoint selection
• In order to position the motor shaft, the
function can work
within the motor control function with the absolute position setpoint
dnPosSetValue_p or alternatively with the speed setpoint nSpeedSetValue_a and
the position difference dnDeltaPos_p.
FALSE Positioning with position setpoint dnPosSetValue_p.
TRUE Positioning with speed setpoint nSpeedSetValue_a and position
difference dnDeltaPos_p.
dnDeltaPos_p
| DINT
Position difference (following error input)
• Difference between setpoint position and actual position in [increments]
• Is used for
if bDeltaPosOn = TRUE.
• Scaling: 65535 ≡ 1 revolution
dnPosSetValue_p
| DINT
Absolute position setpoint in [increments]
• Is used for
if bDeltaPosOn = FALSE.
• Scaling: 65535 ≡ 1 revolution
bPosDerivativeOn
|BOOL
Create a setpoint for the speed controller from the position setpoint
• For highly dynamic control systems, the setpoint for the speed controller can be
created from the absolute position setpoint dnPosSetValue_p instead of the
speed setpoint nSpeedSetValue_a
Position control/additive speed specification
TRUE Create a speed setpoint from the position setpoint.
• The absolute position setpoint dnPosSetValue_p is differentiated
and a speed value is created which is the setpoint for the speed
controller.
• Internal limitation of 65536 increments/ms.
bMotorRefOffsetOn
| BOOL
Set home position ("referencing on the fly")
TRUE Set home position to value dnMotorRefOffset_p.
dnMotorRefOffset_p
| DINT
Home position in [increments]
• Scaling: 65535 ≡ 1 revolution
bQspOn
| BOOL
Quick stop
FALSE Deactivate quick stop
TRUE Activate quick stop
nPWMAngleOffset_a
| INT
Angle step change of output voltage phasor
• Scaling: 65535 ≡ 1 revolution
bSpeedCtrlIOn
| BOOL
Directly set the I-component of speed controller
• In order to statically specify a minimum torque, e.g. when a load is being lifted.
TRUE Se the I-component of the speed controller to the value
nSpeedCtrlI_a.
Identifier
DIS code | data type
Information/possible settings