140 l_posctrllin_1, 140 l_posctrllin_1 1, L_posctrllin_1 – Lenze 8400 HighLine User Manual
Page 1471: Bexec, Bset, Bena, Decel, 17 function library
Lenze · 8400 HighLine · Referenzhandbuch · DMS 10.0 EN · 06/2014 · TD05/TD14
1471
17
Function library
17.1
Function blocks
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
17.1.140
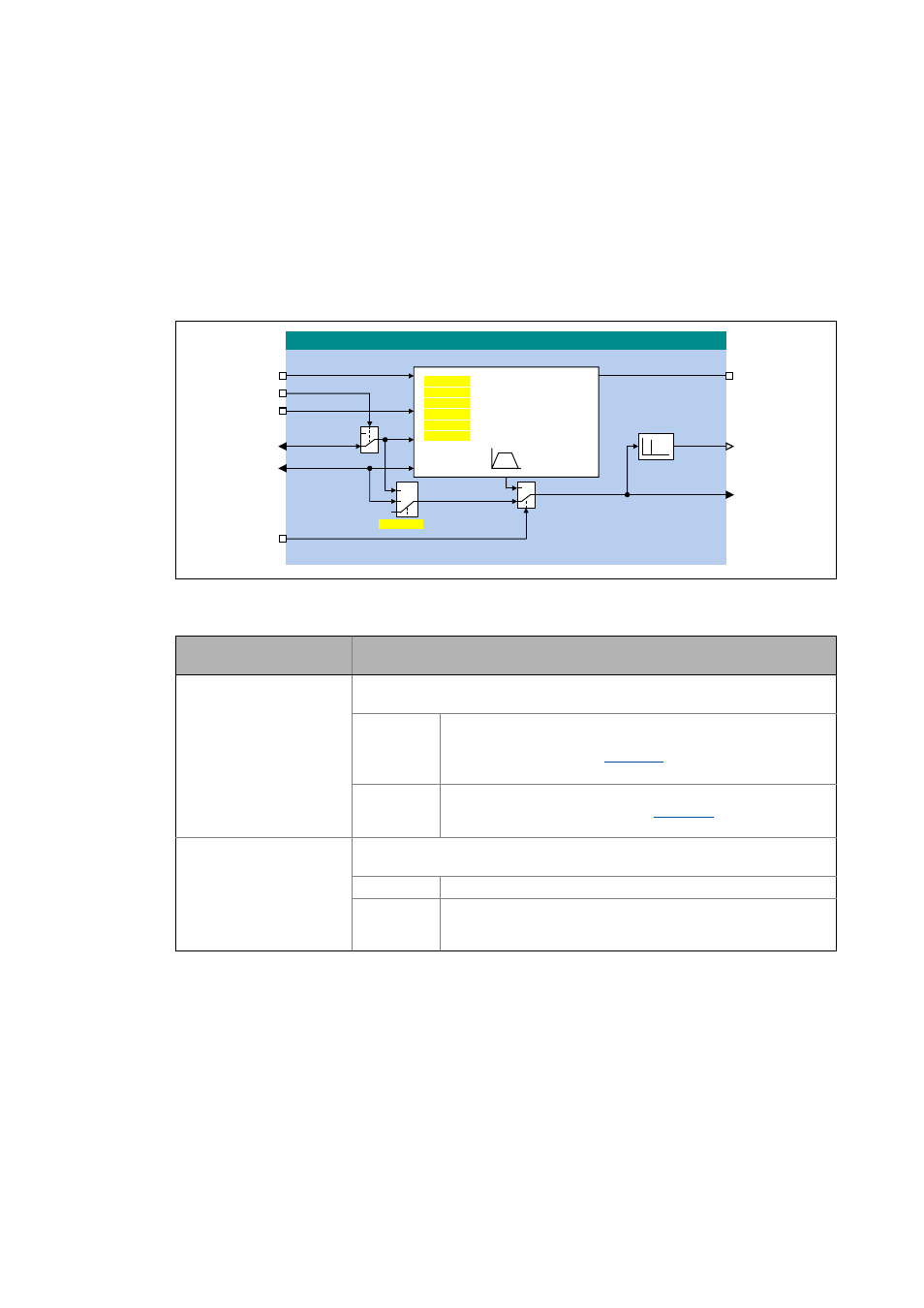
L_PosCtrlLin_1
This FB serves to implement the following positioning functions:
• Bring drive to curve position (e.g. after mains connection, manual jog, homing)
• Release drive from curve and bring it to safe position (position override function)
• Positioning the X axis via X offset (higher-level positioning)
• Positioning the Y axis via Y offset (higher-level positioning)
Inputs
Identifier
Data type
Information/possible settings
bExecute
BOOL
Execute positioning profile
• Only possible if the bEnable input is set to TRUE.
FALSE No positioning/positioning is aborted.
• The speed at the nNOut_v output is braked to standstill via the
deceleration ramp set in
(nNOut_v = 0).
• At the same time, the dnPosOut_p output is stopped.
FALSETRUE Positioning is executed/continued.
• In case of an activated limit stop (
= TRUE), a renewed
positive edge for a following positioning procedure is required.
bSetPos0
BOOL
Travel to zero position
• Only possible if the bEnable input is set to TRUE.
FALSE The value at the dnSet_p input is used as setpoint position.
TRUE The value at the dnSet_p input is ignored. The setpoint position is
internally set to "0" and the dnPosOut_p output can be travelled to
zero position.
/B3RV&WUO/LQB
E([HFXWH
E6HW3RV
E3RV0RGH
GQ6HWBS
GQ$FWBS
E(QDEOH
&
&
&
&
&
&
&
E,Q7DUJHW
Q12XWBY
GQ3RV2XWBS
/LPLWVWRS
'HFHOHUDWLRQRIVHWSRVLWLRQ
$FFHOHUDWLRQUDPS
'HFHOHUDWLRQUDPS
)RUZDUGPRWLRQ
5HWXUQPRWLRQ
3RVLWLRQLQJEHKDYLRXU