4 synchronising slave drive to master drive, Synchronising slave drive to master drive 2, 17 function library – Lenze 8400 HighLine User Manual
Page 1352
17
Function library
17.1
Function blocks
1352
Lenze · 8400 HighLine · Referenzhandbuch · DMS 10.0 EN · 06/2014 · TD05/TD14
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
17.1.73.4 Synchronising slave drive to master drive
If an angular synchronism of the drives is required (e.g. in printing units), the slave drives must be
positioned to the master position since the FB L_DFSET as a master value can only receive and
process one relative signal. The FB L_DFSET receives the master value via a real-time capable
MotionBus as the system bus (CAN).
For synchronisation purposes, the slave drive is informed cyclically or once about its drive position
by a pulse generated by the master drive. This pulse is either the zero pulse of the master feedback
or the edge of a touch probe sensor. Moreover, a pulse must be generated by the slave drive. Only if
the FB L_DFSET receives both signals, it can execute a synchronisation.
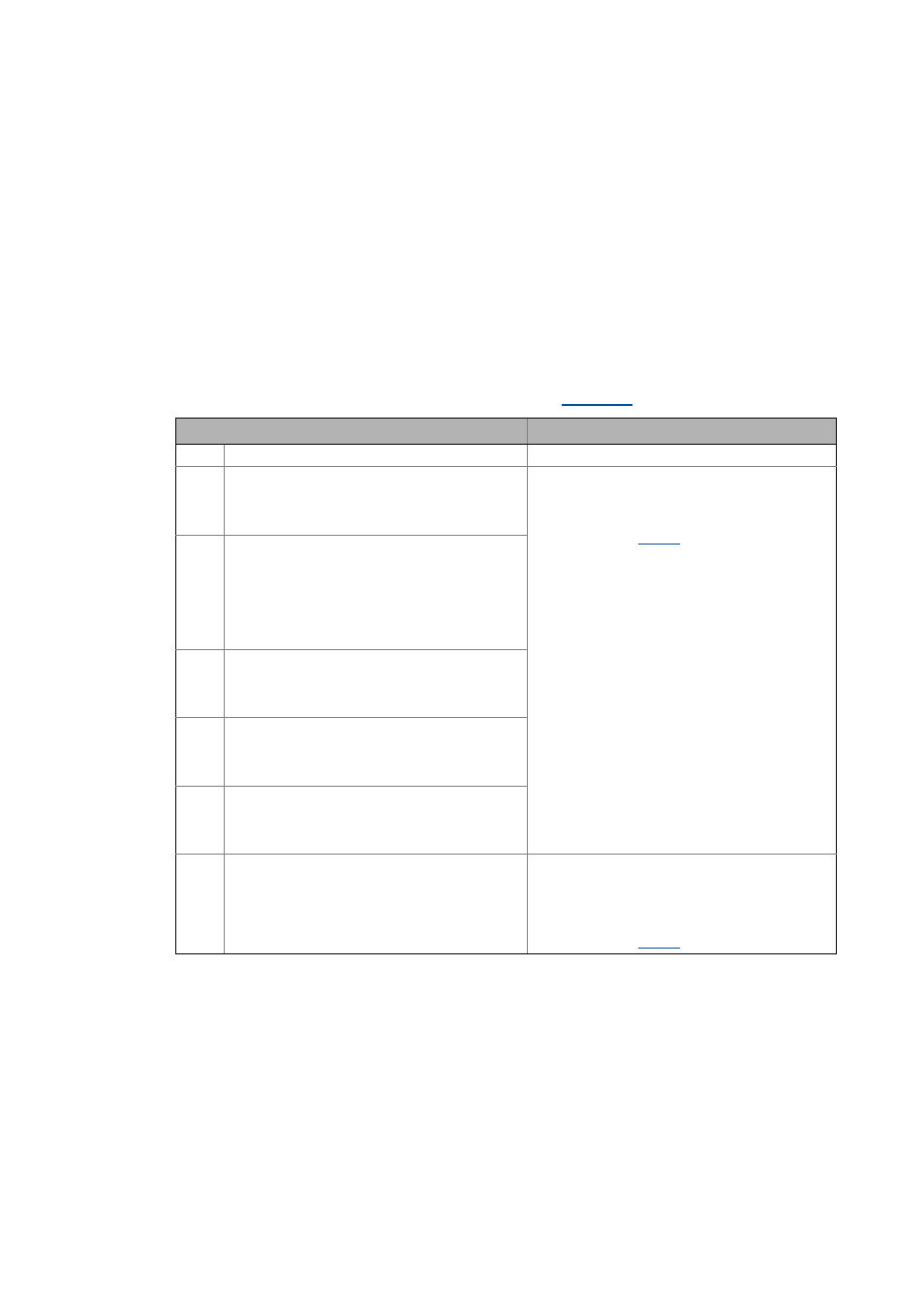
Synchronisation mode - mark correction
For synchronisation, the following modes are available in
:
Mode
Info
0 Synchronisation inactive
Lenze setting
1 Permanent synchronisation without enable via the
bZeroPulse input
• Correction is executed over the shortest possible
path.
The synchronisation only takes place after 2 setpoint
pulses have been received at the bSetTPReceived
input.
(required pulse order: set-actual-set)
• See illustration
[17-37]
.
( 1353)
2 Permanent synchronisation only with enable via the
bZeroPulse input
• When bZeroPulse is set to TRUE, a permanent
zero pulse/touch probe synchronisation is
executed.
• Correction is executed over the shortest possible
path.
10 One-time synchronisation only with enable via the
bZeroPulse input
• An angular difference is compensated over the
shortest possible path.
11 One-time synchronisation only with enable via the
bZeroPulse input
• An angle difference is compensated in CW
direction.
12 One-time synchronisation only with enable via the
bZeroPulse input
• An angular difference is compensated in CCW
direction.
13 One-time synchronisation only with enable via the
bZeroPulse input
• An angular difference is compensated over the
shortest possible path.
Synchronisation takes place after the first setpoint
pulse has been received at the bSetTPReceived input
and/or actual value pulse at the bActTPReceived
input.
(Required clock sequence: Set/actual or actual/set)
• See illustration
[17-38]
.
( 1353)