1 parameterising digital inputs as encoder inputs, Parameterising digital inputs as encoder inputs, 5motor control (mctrl) – Lenze 8400 HighLine User Manual
Page 277
Lenze · 8400 HighLine · Referenzhandbuch · DMS 10.0 EN · 06/2014 · TD05/TD14
277
5
Motor control (MCTRL)
5.11
Encoder/feedback system
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.11.1
Parameterising digital inputs as encoder inputs
The function of the digital inputs DI1/DI2 and DI6/DI7 is defined via
.
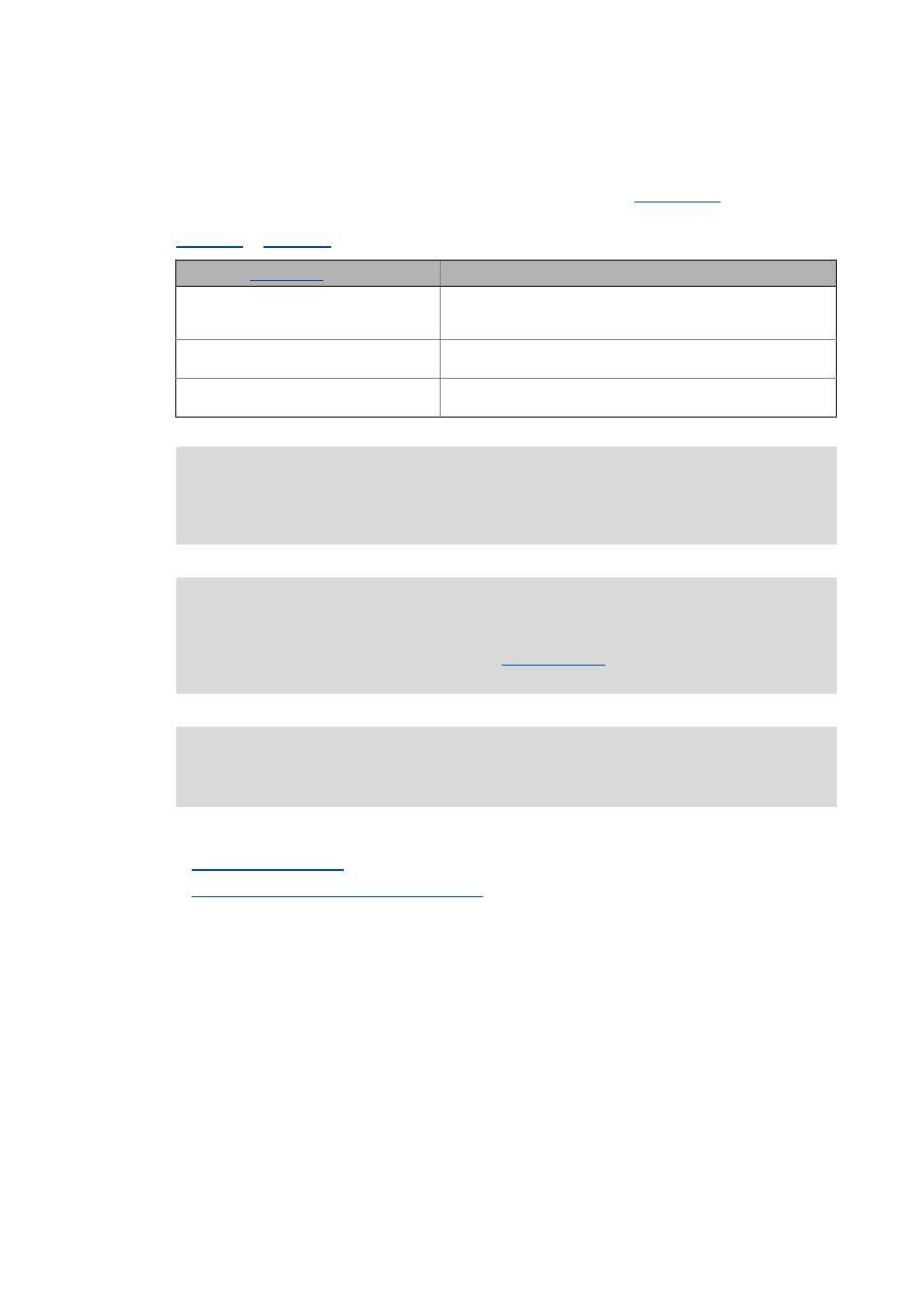
To be able to use the digital inputs as encoder inputs, select 2, 3, or 4 (Lenze recommendation: 2) in
, depending on the input terminals used.
Related topics:
Using DI1(6) and DI2(7) as frequency inputs
Selection in
Function
2: DI1(6)&DI2(7)=FreqIn (2-track)
DI1/6 and DI2/7 = 2-track frequency input
• Permits a two-track evaluation of the encoder including correct
detection of the direction of rotation.
3: DI1(6)=FreqIn / DI2(7)=Direction
DI1/6 = 1-track frequency input
DI2/7 = specification of direction
4: DI1(6)=CountIn / DI2(7)=In
DI1/6 = counter input
DI2/7 = digital input
Danger!
For single-track evaluation, make sure that the sign is correctly specified. Otherwise, the
motor may overspeed.
Note!
If the digital inputs are parameterised as encoder inputs, the corresponding output
signals (bIn1/bIn2 and bIn6/bIn7) at the
system block are automatically
set to FALSE.
The wiring diagram and assignment of the input terminals are described in the 8400
hardware manual . The hardware manual has been stored in electronic form on the data
carrier supplied with the 8400 controller.