IAI America TT-C3 User Manual
Page 90
80
INTELLIGENT ACTUATOR
Chapter 4 Commands
1.
List
of
SEL
Language
Command
Codes
by
Function
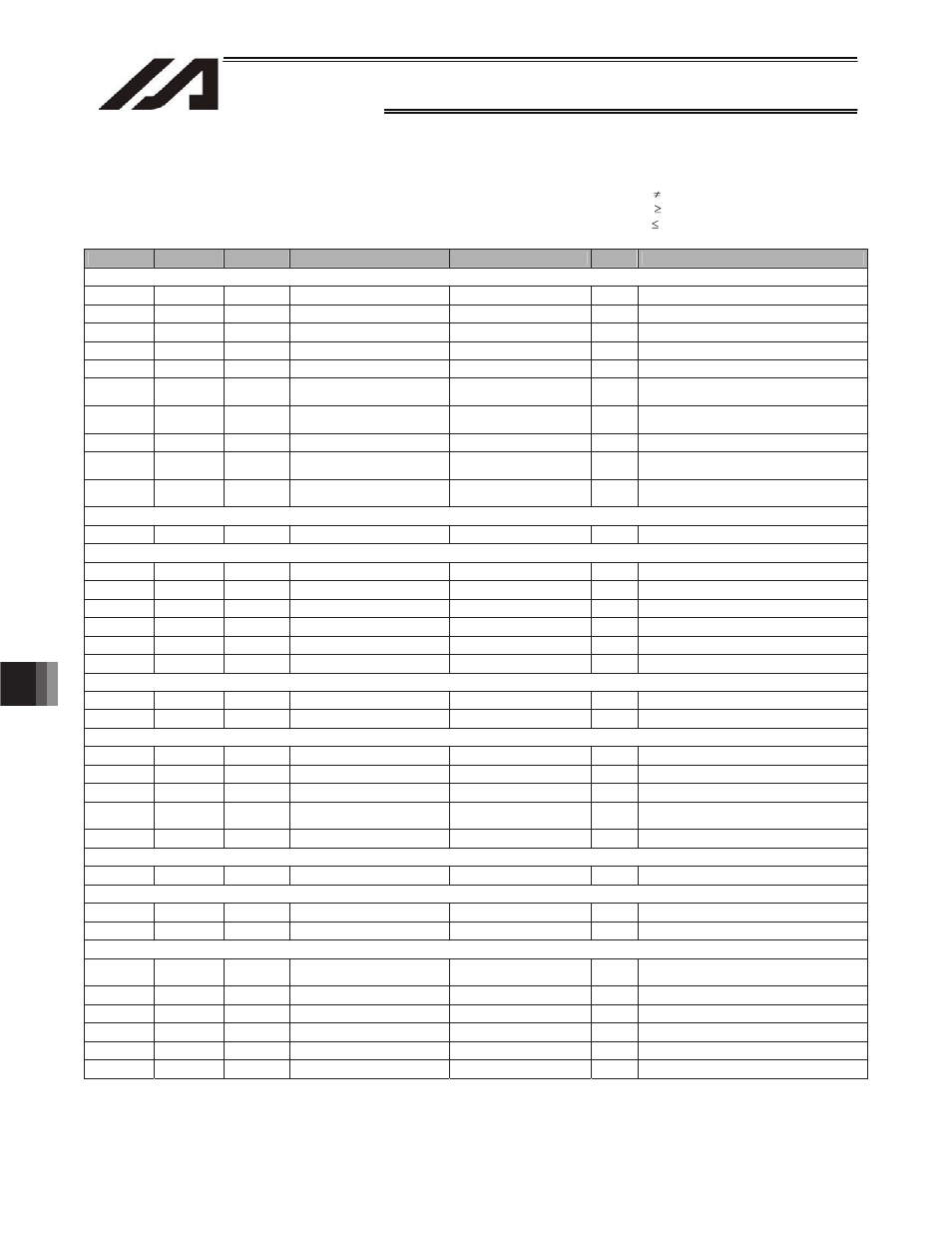
Operation type in the output field
CC: Command was executed successfully, ZR: Operation result is zero,
PE: Operation is complete, CP: Command part has passed, TU: Time up
EQ: Operand 1 = Operand 2, NE: Operand 1 Operand 2,
GT: Operand 1 > Operand 2, GE: Operand 1
Operand 2,
LT:
Operand 1 < Operand 2, LE: Operand 1 Operand 2
Command
Page
Condition
Operation1
Operation2
Output
Function
E
EDDO
175
Prohibited
Prohibited
Prohibited
CP
Declare end of DO
EDIF
173
Prohibited
Prohibited
Prohibited
CP
Declare end of IF
EDPA
201
Prohibited
Prohibited
Prohibited
CP
Declare end of palletizing setting
EDSL
179
Prohibited
Prohibited
Prohibited
CP
Declare end of SLCT
EDSR
112
Prohibited
Prohibited
Prohibited
CP
End subroutine
ELSE
173
Prohibited
Prohibited
Prohibited
CP
Declare execution destination when IF
command condition is not satisfied
EOR
94
Optional
Exclusive-OR operand
variable
Operand
ZR
Logical exclusive-OR
EXIT
113
Optional
Prohibited
Prohibited
CP
End program
EXPG
114
Optional
Execution program number
(Execution program
number)
CC
Start program
EXSR
111
Optional
Execution subroutine
number
Prohibited
CP
Execute subroutine
F
FMIO
Optional
Format type
Prohibited
CP
Set IN (B)/OUT (B) command format
G
GACC
131
Optional
Variable number
Position number
CP
Get acceleration data
GDCL
132
Optional
Variable number
Position number
CP
Get deceleration data
GOTO
110
Optional
Jump-destination tag number Prohibited
CP
Jump
GRP
141
Optional
Valid axis pattern
Prohibited
CP
Set group axes
GTTM
98
Optional
Time assignment variable
Prohibited
CP
Get time
GVEL
Optional
Variable number
Position number
CP
Get speed data
H
HOLD
142
Optional
(Input port to pause)
(HOLD type)
CP
Declare port to pause
HOME
150
Optional
Home-return axis pattern
Prohibited
PE
Return to home
I
IFXX
171
Optional
Comparison variable
Comparison value
CP
Compare [EQ, NE, GT, GE, LT, LE]
INB
Optional
Head I/O, flag
Conversion digits
CC
Input BCD (8 digits max.)
IN
Optional
Head I/O, flag
End I/O, flag
CC
Input binary (32 bits max.)
ISXX
172
Optional
Column number
Column number,
character literal
CP
Compare strings
ITER
175
Optional
Prohibited
Prohibited
CP
Repeat DO
J
JXWX
156
Optional
Axis operation pattern
Start I/O, flag
PE
Jog [FN, FF, BN, BF]
L
LEAV
174
Optional
Prohibited
Prohibited
CP
Pull out from DO
LET
84
Optional
Assignment variable
Assigned value
ZR
Assign
M
MOD
88
Optional
Remainder assignment
variable
Divisor
ZR
Calculate remainder
MOVL
152
Optional
Destination position number
Prohibited
PE
Move to specified position via interpolation
MOVP
151
Optional
Destination position number
Prohibited
PE
Move to specified position
MULT
87
Optional
Multiplicand variable
Multiplier
ZR
Multiply
MVLI
154
Optional
Travel position number
Prohibited
PE
Move to relative position via interpolation
MVPI
153
Optional
Travel position number
Prohibited
PE
Move to relative position
107
130
104
103