Appendix, How to create a program, Position table – IAI America TT-C3 User Manual
Page 261
251
INTELLIGENT ACTUATOR
Appendix
Appendix
Appendix
~ How to Create a Program
1. Position
Table
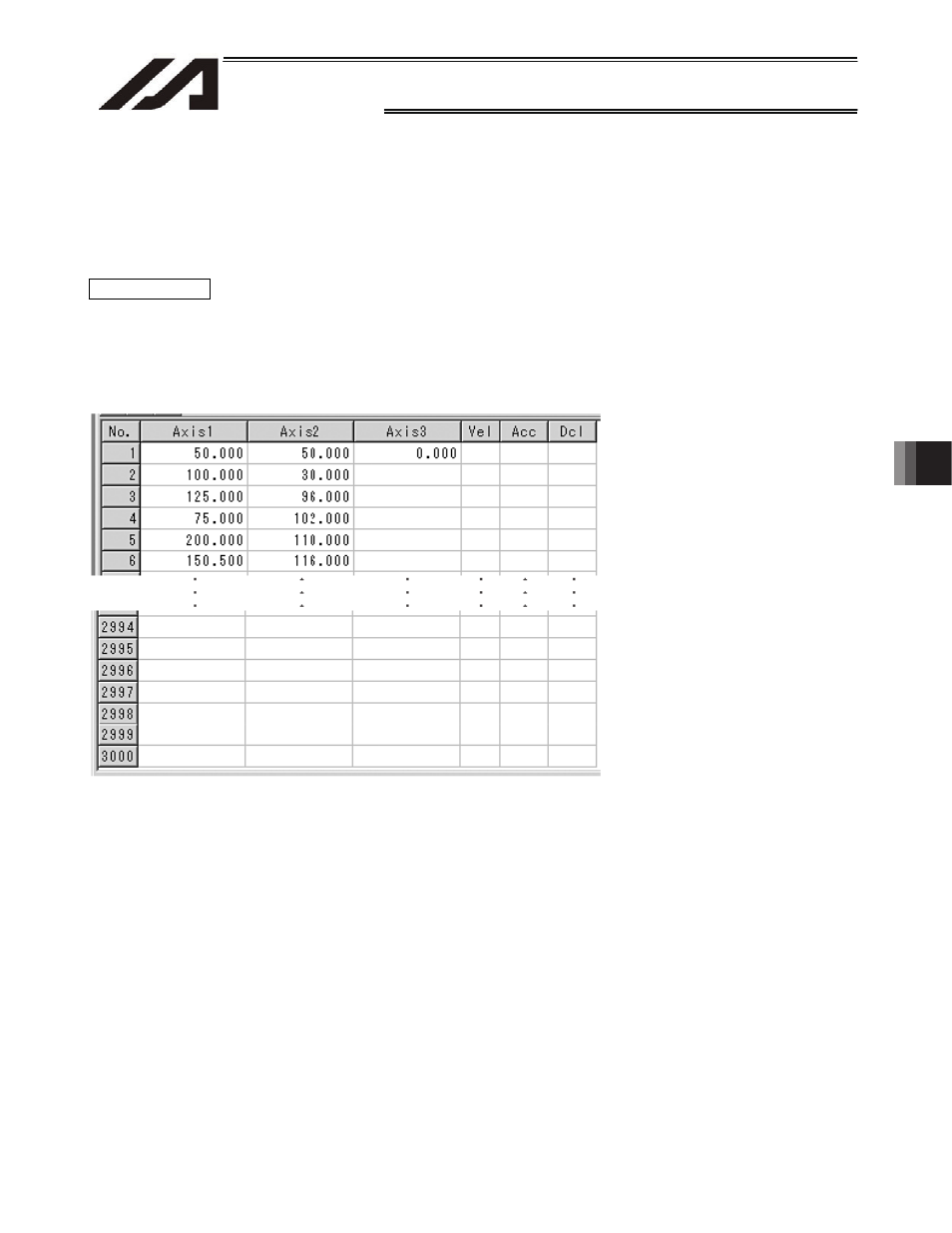
Position table
The Tabletop Robot can store 3,000 positions.
Positions are registered using the PC software or teaching pendant.
(Example with a 3-axis system)
No.:
Specify a desired number in each program, and the actuator will move to the
corresponding position registered under the number.
Axis 1 to 3: Enter a desired position for each axis under each position number.
Vel:
Set a speed. The speed set in this field takes precedence over the speed specified
directly in a program. In other words, specifying a position number will move the actuator
to the applicable position at the speed specified in the Vel field under that position
number.
Acc:
Set an acceleration. The acceleration set in this field takes precedence over the
acceleration specified directly in a program or set by a parameter.
Dcl:
Set a deceleration. The deceleration set in this field takes precedence over the
deceleration specified directly in a program or set by a parameter.