Output control during path movement – IAI America TT-C3 User Manual
Page 267
257
INTELLIGENT ACTUATOR
Appendix
Appendix
7. Output Control during Path Movement
Description
In a coating operation, etc., output control is sometimes required while the robot is moving. The
Tabletop Robot can output signals while moving under a PATH command.
How to Use
Before a PATH command, declare a POTP command to enable signal output during movement.
If the output field of the PATH command specifies a given output port or global flag, the output port or
flag specified in the output field will turn ON when the actuator, moving via path operation, approaches
the position specified in the PATH command.
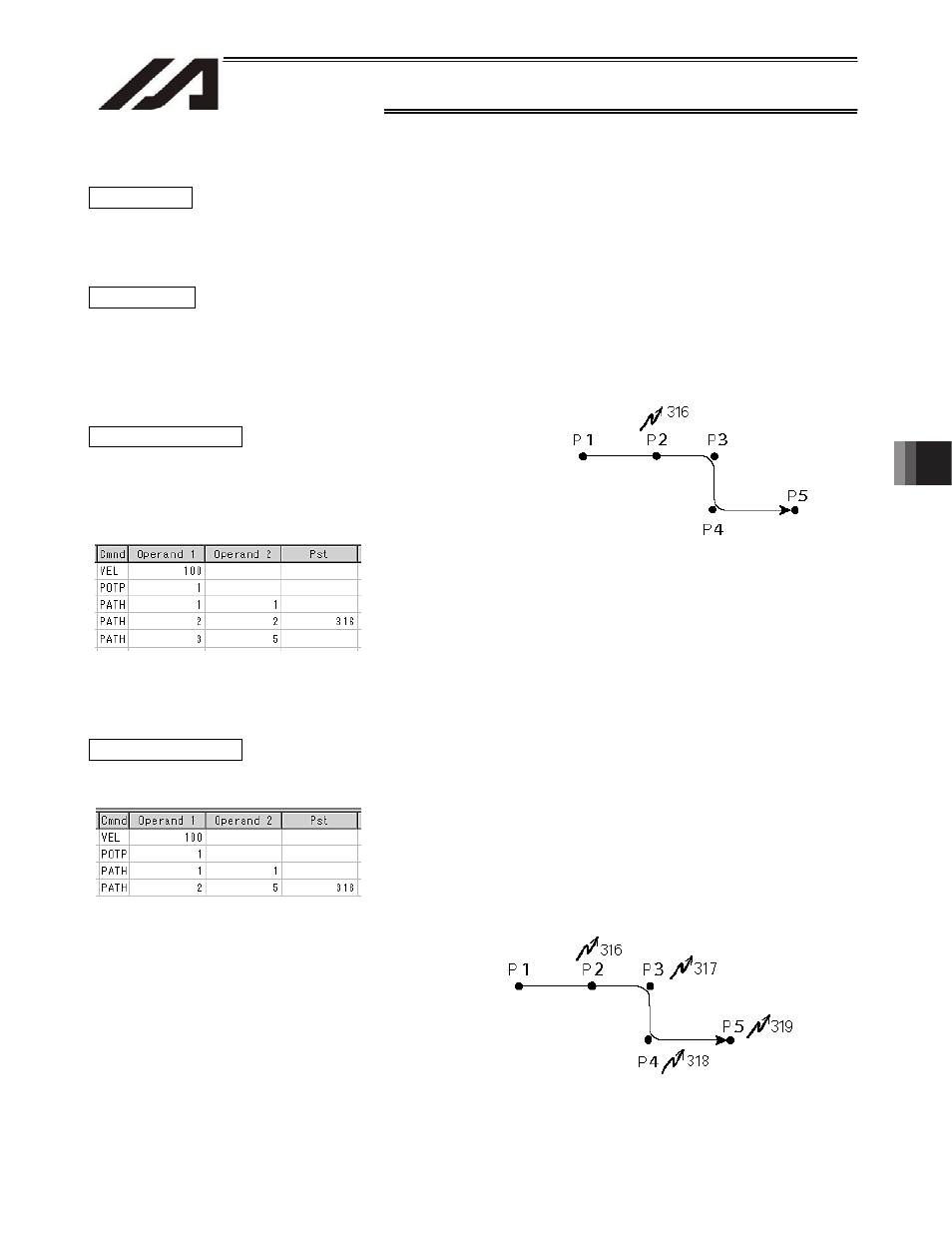
Example of Use 1
The actuator moves from P1 to P5, as shown to the right,
without stopping. It turns ON output port 316 upon
approaching P2.
Output ports and flags can only be turned ON using a POTP command. To turn OFF the port or flag that was
turned ON during path operation, do so in a subsequent program step (using a BTOF command).
Example of Use 2
Output ports 310 to 313 can be turned ON successively at positions P2 to P5.
m A declaration command to enable signal output during path movement.
m Port 316 is turned ON at position P2 specified in this step.
m A declaration command to enable signal output during path movement.
m Output ports 316 to 319 are turned ON successively at positions P2 to
P5 specified in this step.