Axis-specific parameters, Appendix – IAI America TT-C3 User Manual
Page 309
299
INTELLIGENT ACTUATOR
Appendix
Appendix
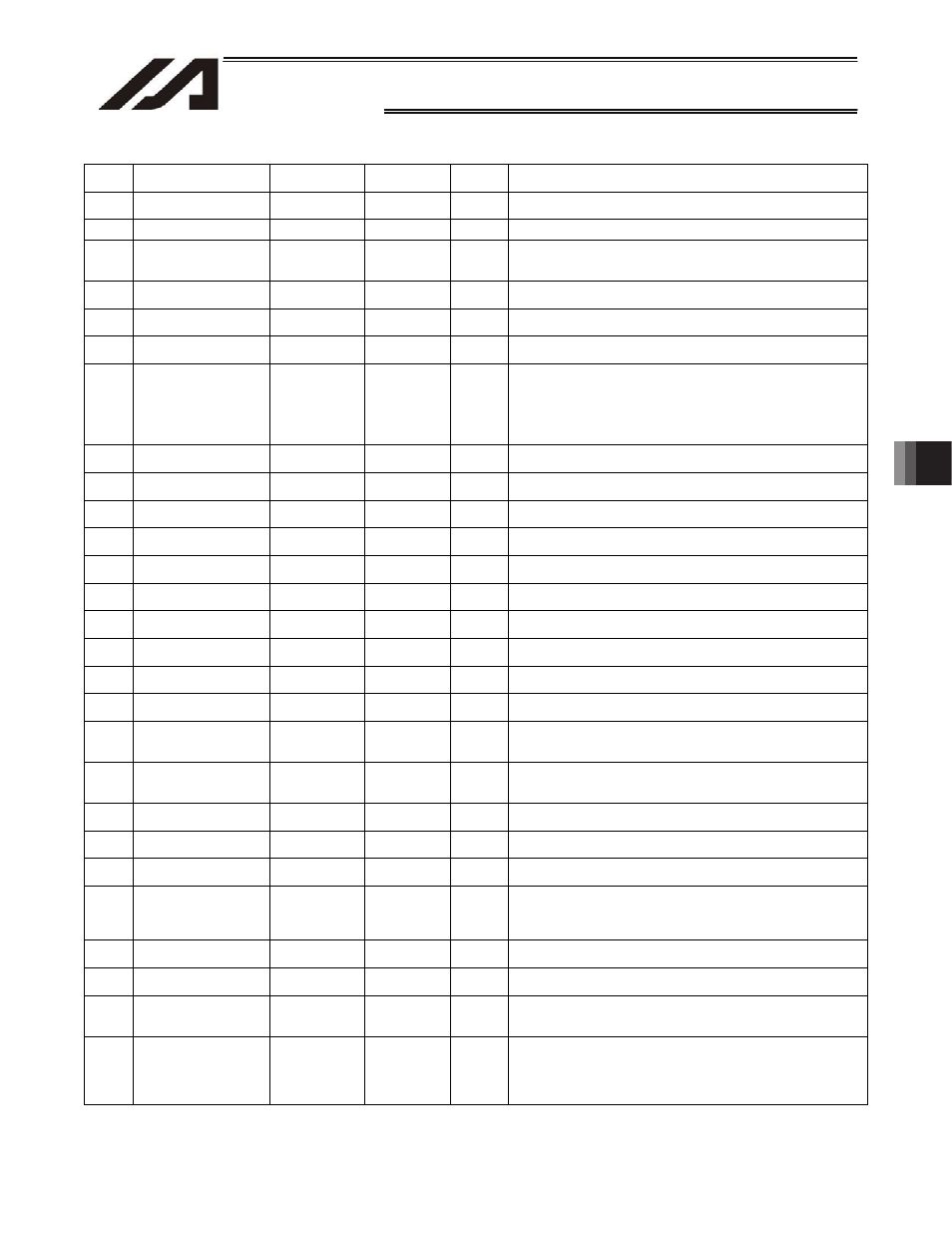
3. Axis-Specific
Parameters
No Parameter
name
Default value
(Reference)
Input range
Unit
Remarks
1
Axis operation type
0
0 to 1
0: Linear movement axis, 1: Rotational movement axis (Angle
control)
2 to 5
(For expansion)
0
a
6 Coordinate/physical-
operation direction
selection
1
0 to 1
0: Motor CCW
o Positive direction on the coordinate system
1: Motor CCW
o Negative direction on the coordinate system
7
Soft limit +
50000
-99999999 to
99999999
0.001
mm
Fixed to 359.999 degrees internally in the index mode. Invalid in the
infinite-stroke mode.
8
Soft limit –
0
-99999999 to
99999999
0.001
mm
Fixed to 0 degree internally in the index mode. Invalid in the infinite-
stroke mode.
9 Soft-limit
actual
position
margin
2000
0 to 9999
0.001
mm
Actual position margin in the positioning boundary critical zone in
the infinite-stroke mode
10
Home-return method
0
0 to 5
0: Search phase Z after end search
1: Current position 0 home (This parameter can be specified only
with an incremental encoder. Pay attention to contact.),
2: Current position = Preset home (This parameter can be
specified only with an incremental encoder. Pay attention to
contact.)
11 Home-return
end-search
direction selection
0
0 to 1
0: Negative end of the coordinate system
1: Positive end of the coordinate system
12
Home preset value
0
-99999999 to
99999999
0.001
mm
(Refer to axis-specific parameter No. 76)
13 SIO/PIO
home-return
order
0
0 to 16
Executed from the smallest one.
14 For
future
expansion
(Change prohibited)
0 Reference
only
15 For
future
expansion
(Change prohibited)
0 Reference
only
16 For
future
expansion
(Change prohibited)
0 Reference
only
17 For
future
expansion
(Change prohibited)
10 Reference
only
mm/sec
18 For
future
expansion
(Change prohibited)
100 Reference
only
mm/sec
19
End search speed at
home return
20
1 to 100
mm/sec
20
Phase-Z search speed
at home return
3
1 to 10
mm/sec
Exercise caution, since limitations apply depending on the
read/encoder pulse count.
21
Offset travel distance at
home return
2500 -99999999
to
99999999
0.001
mm
Offset travel distance from the ideal phase-Z position (Positive
value = Applied in the direction of moving away from the end)
(Refer to axis-specific parameter No. 76)
22 Error
check
tolerance
for phase-Z position at
home return
0
0 to 99999999
0.001
mm
Minimum allowable actual distance of “End (mechanical or LS)
Phase Z,” in the case of a rotary encoder
23 Phase-Z
count
per
encoder revolution
1
1 to 8
Only “1” can be set, in the case of an absolute encoder.
24
Push stop check time at
home return
1500
1 to 5000
msec
Used to check the push motion during home return.
25
Push stop check time at
positioning
500
1 to 5000
msec
Used to check the push motion during PUSH command operation.
26 (Phase-Z
evacuation
distance at absolute
home return (old))
1000
0 to 99999
0.001
mm
Evacuation distance from the actual phase-Z position (Positive
value = Applied in the direction of moving away from the end)
(Phase-shift prevention margin) (Refer to axis-specific parameter
No. 76)
27 Maximum
motor
speed
5000
Reference
only
rpm,
mm/sec
Rpm value in the case of a rotary encoder (Change prohibited)
28 Maximum
operating
speed of each axis
300
1 to 9999
mm/s
29
VLMX speed
300
1 to 9999
mm/s
During VLMX operation, the maximum operating speed of each axis
or VLMX speed, whichever is lower, is used as the maximum speed
of the applicable axis.
30
Servo ON check time
20
0 to 5000
msec
Brake equipped:
Time after receiving a servo-ON start
response until start of brake unlocking
Brake not equipped: Time after receiving a servo ON start
response until transition to an operation-
enabled status