IAI America TT-C3 User Manual
Page 142
132
INTELLIGENT ACTUATOR
Chapter 4 Commands
2.
Explanation
of
Commands
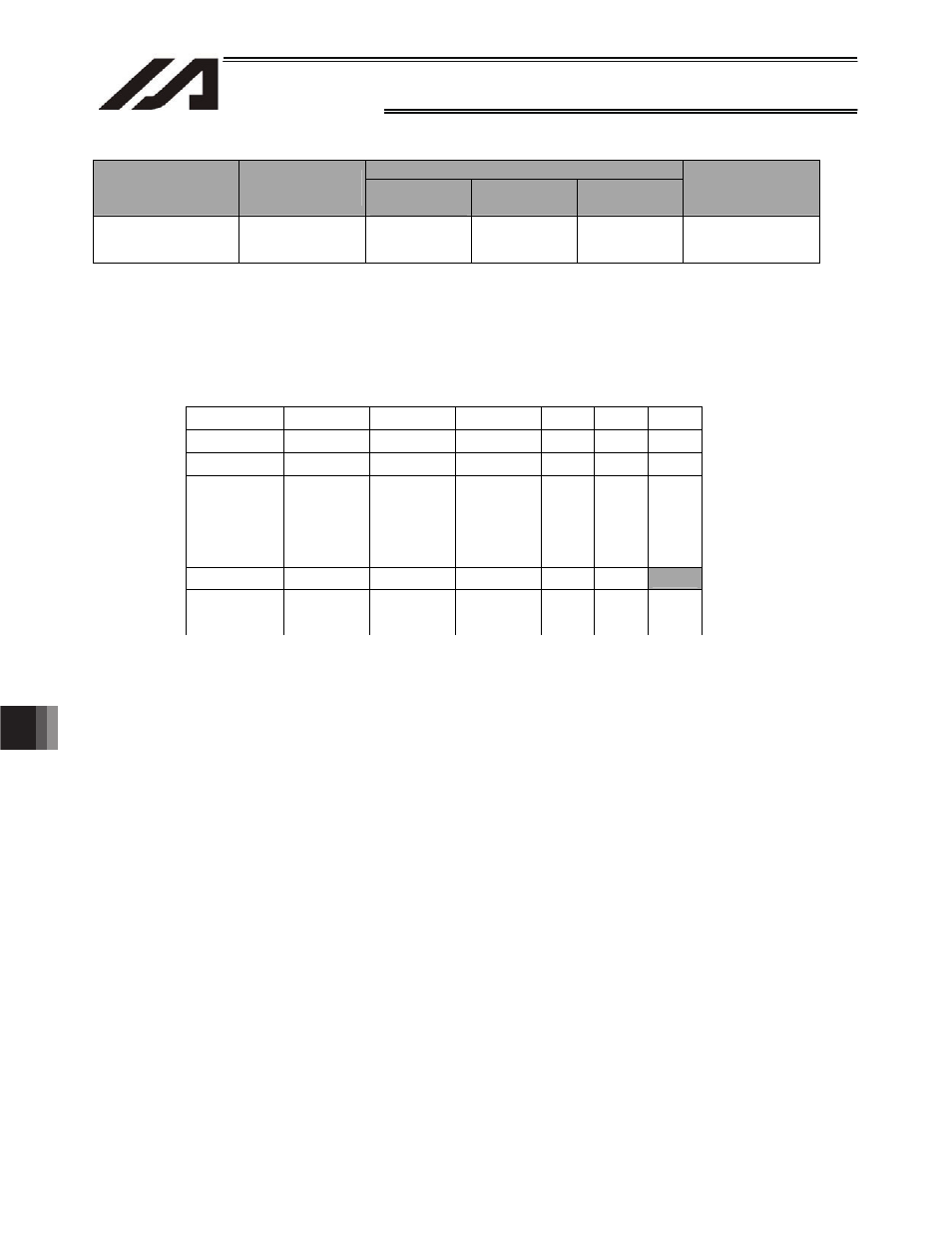
z GDCL (Get deceleration data)
Command, declaration
Extension condition
(LD, A, O, AB, OB)
Input condition
(I/O, flag)
Command,
declaration
Operand 1
Operand 2
Output
(Output, flag)
Optional Optional
GDCL
Variable
number
Position
number
CP
[Function] Obtain deceleration data from the deceleration item in the position data specified in operand
2, and set the value in the variable specified in operand 1.
[Example]
GDCL
100
10
Set the deceleration data at position No. 10 in variable 100.
Position No.
Axis 1
Axis 2
Axis 3
Vel
Acc
Dcl
1 XXX.XXX
XXX.XXX
XXX.XXX
XXX
X.XX
X.XX
2 XXX.XXX
XXX.XXX
XXX.XXX
XXX
X.XX
X.XX
x
x
x
x
10 50.000
100.000
150.000
200
0.30
0.30
x
x
If the position data is set as above when the command is executed, 0.3 will be set in variable 100.