2 path/pspl commands, 3 cir/arc commands, 4 cir2/arc2/arcd/arcc commands – IAI America TT-C3 User Manual
Page 236
226
INTELLIGENT ACTUATOR
Chapter 4 Commands
3.
Key
Characteristics
of
Actuator
Control
Commands
and
Points
to
Note
3.2 PATH/PSPL
Commands
When executing a PATH or PSPL command, pay attention to the locus because it will change if the
acceleration/deceleration is different between points.
The locus can be fine-tuned by changing the acceleration/deceleration, but different
acceleration/deceleration settings between points will prevent smooth transition of speeds when moving from
one position to another.
If there is a large difference in deceleration/acceleration between points and the positioning distance is small,
the speed may drop. Exercise caution.
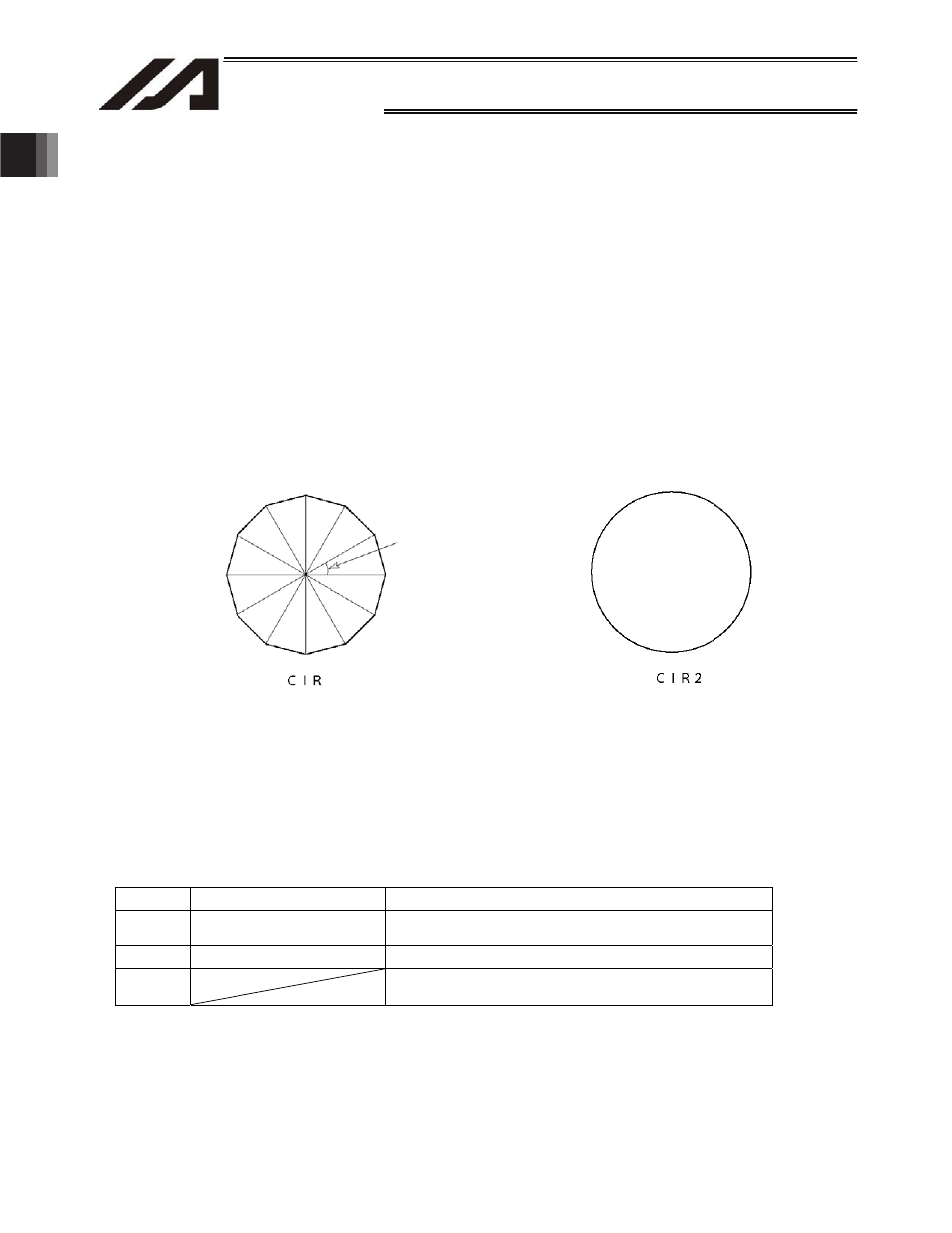
3.3 CIR/ARC
Commands
The processing by a CIR or ARC command resembles moving along a polygon with a PATH command.
A small division angle may cause the speed to drop.
CIR2, ARC2, ARCD and ARCC commands actually perform arc interpolation.
3.4 CIR2/ARC2/ARCD/ARCC
Commands
With a CIR2, ARC2, ARCD or ARCC command, the speed can be changed (only in the arc interpolation
section) by inputting a speed for the point specified in operand 1. These commands are effective when you
must lower the speed partially because the radius is small and the arc locus cannot be maintained inside the
allowable range.
The speed and acceleration will take valid values based on the following priorities:
Priority
Speed
Acceleration (deceleration)
1
Setting in the position data
specified in operand 1
Setting in the position data specified in operand 1
2
Setting by VEL command
Setting by ACC (DCL) command
3
Default acceleration in all-axis parameter No. 11
(Default deceleration in all-axis parameter No. 12)
Division angle set by a
DEG command