IAI America TT-C3 User Manual
Page 171
161
INTELLIGENT ACTUATOR
Chapter 4 Commands
2.
Explanation
of
Commands
z CIR2 (Move along circle 2 (arc interpolation))
Command, declaration
Extension condition
(LD, A, O, AB, OB)
Input condition
(I/O, flag)
Command,
declaration
Operand 1
Operand 2
Output
(Output, flag)
Optional Optional
CIR2
Passing
position 1
number
Passing
position 2
number
PE
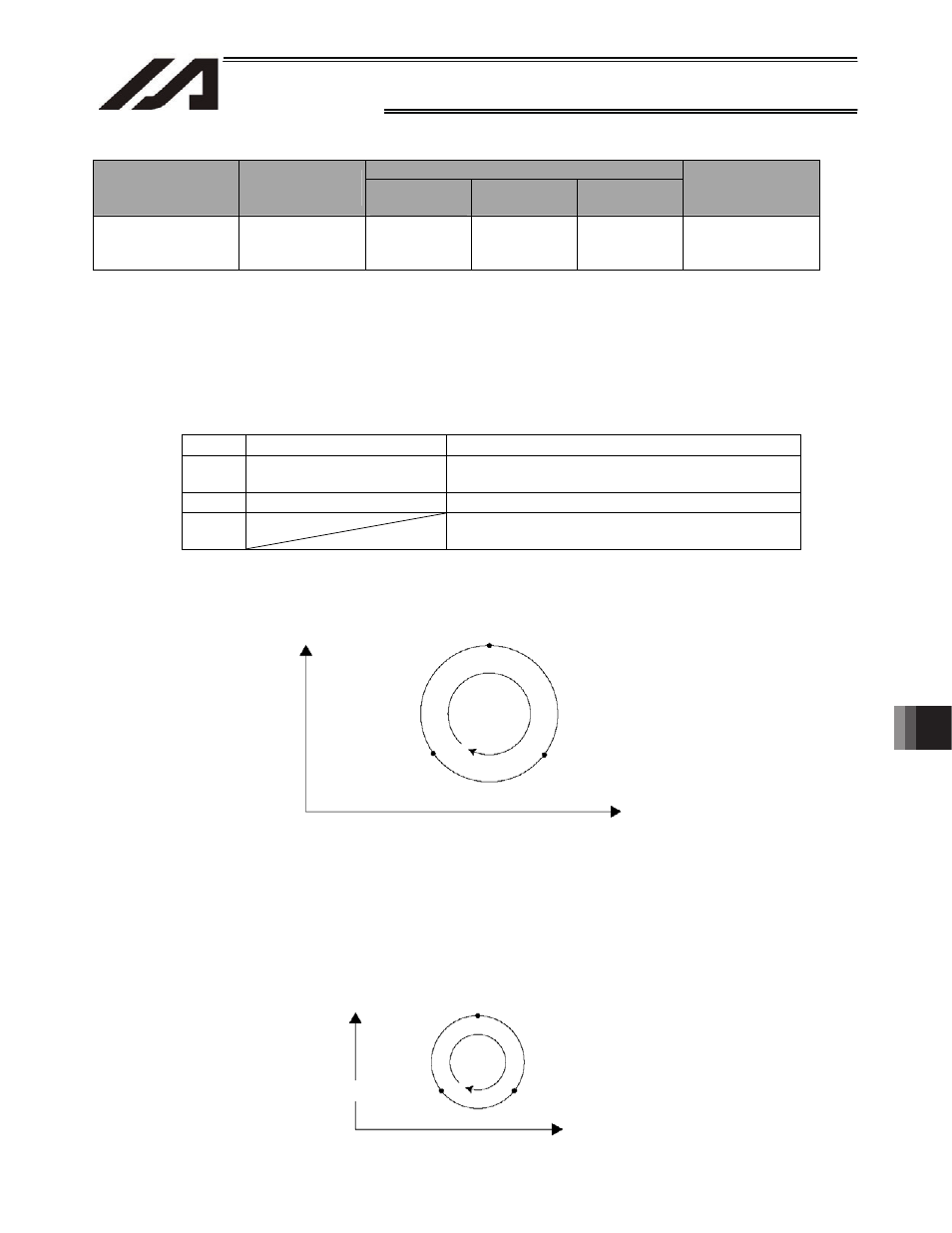
[Function] Move along a circle originating from the current position and passing positions 1 and 2, via
arc interpolation.
The rotating direction of the circle is determined by the given position data.
The diagram below describes a CW (clockwise) movement. Reversing passing positions 1
and 2 will change the direction of movement to CCW (counterclockwise).
The speed and acceleration will take valid values based on the following priorities:
Priority
Speed
Acceleration (deceleration)
1
Setting in the position data
specified in operand 1
Setting in the position data specified in operand 1
2
Setting by VEL command
Setting by ACC (DCL) command
3
Default acceleration in all-axis parameter No. 11
(Default deceleration in all-axis parameter No. 12)
If speed is not set, a “C88 speed specification error” will generate.
If acceleration/deceleration is not valid, a “C89 acceleration/deceleration specification error” will
generate.
(Note)
This command is valid on arbitrary orthogonal planes. (Axis 2 may be selected automatically
prior to axis 1 in accordance with the position data.)
[Example]
VEL
100
Set the speed to 100 mm/sec.
CIR2
100
101
Move along a circle (circular interpolation) passing position
Nos. 100 and 101.
Passing position 1
Position origin
Axis 1
Axis 2
Passing position 2
Position No. 100
Position origin
Axis 1
Axis 2
Position No. 101