IAI America TT-C3 User Manual
Page 176
166
INTELLIGENT ACTUATOR
Chapter 4 Commands
2.
Explanation
of
Commands
z ARCD (Move along arc via specification of end position and center angle (arc interpolation))
Command, declaration
Extension condition
(LD, A, O, AB, OB)
Input condition
(I/O, flag)
Command,
declaration
Operand 1
Operand 2
Output
(Output, flag)
Optional Optional
ARCD
End position
number
Center angle
PE
[Function] Move along an arc originating from the current position and terminating at the end position,
via arc interpolation.
Specify the end position of movement in operand 1, and the center angle formed by the
position origin and end position in operand 2. The center angle is set in a range from –
359.999 to –0.001 or from 0.001 to 359.999. A positive value indicates CCW
(counterclockwise) movement, while a negative value indicates CW (clockwise) movement.
The center angle is set in degrees and may include up to three decimal places.
The speed and acceleration will take valid values based on the following priorities:
Priority
Speed
Acceleration (deceleration)
1
Setting in the position data
specified in operand 1
Setting in the position data specified in operand 1
2
Setting by VEL command
Setting by ACC (DCL) command
3
Default acceleration in all-axis parameter No. 11
(Default deceleration in all-axis parameter No. 12)
If speed is not set, a “C88 speed specification error” will generate.
If acceleration/deceleration is not valid, a “C89 acceleration/deceleration specification error” will
generate.
(Note 1)
This command is valid on arbitrary orthogonal planes. (Axis 2 may be selected automatically
prior to axis 1 in accordance with the position data.)
[Example]
VEL
100
Set the speed to 100 mm/sec.
ARCD
100
120
Move along an arc from the position origin to position No.
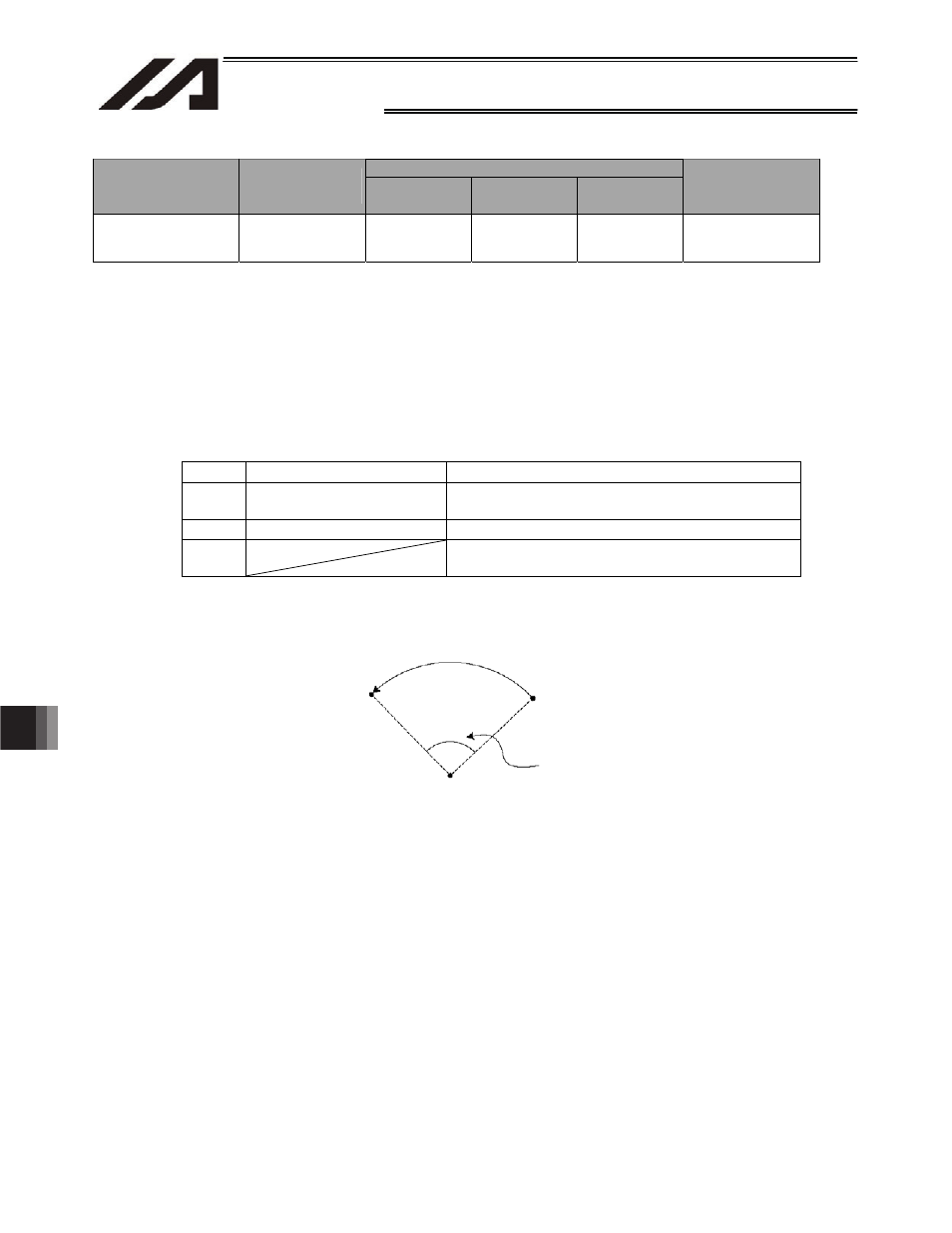
100 for a center angle of 120 degrees (CCW direction).
(Note 2)
The rotating direction of the actual operation locus varies depending on whether the system is
of gate type or cantilever type. Be sure to perform test operation to check the rotating
direction.
End position
Position origin
Center angle