Aborting the operation 1 (canc) – IAI America TT-C3 User Manual
Page 276
266
INTELLIGENT ACTUATOR
Appendix
Appendix
16. Aborting the Operation 1 (CANC)
Description
Use a declaration command CANC to cause the moving axis to decelerate to a stop and cancel the
remaining operation.
How to Use
While the CANC input is ON, operations of all movement commands in the program are aborted.
Example of Use
CANC command
CANC 20
:
MOVP 1
MOVP 2
:
WTON 21
:
* Declare a CANC in a step before the movement command you want to abort.
* While the CANC input is ON, operation commands are cancelled successively, while non-operation
commands (I/O processing, calculation processing, etc.) are executed successively.
Note
Using a CANC may cause a situation where the currently executed step in the program can no longer
be identified. To prevent this situation, it is recommended that an input wait step be created using a
WTON command.
Application
The input signal pattern can be selected using operand 2 of the CANC command.
0 = Contact a (The axis decelerates to a stop)
Same as when operand 2 is not
specified.
1 = Contact b (The axis decelerates to a stop)
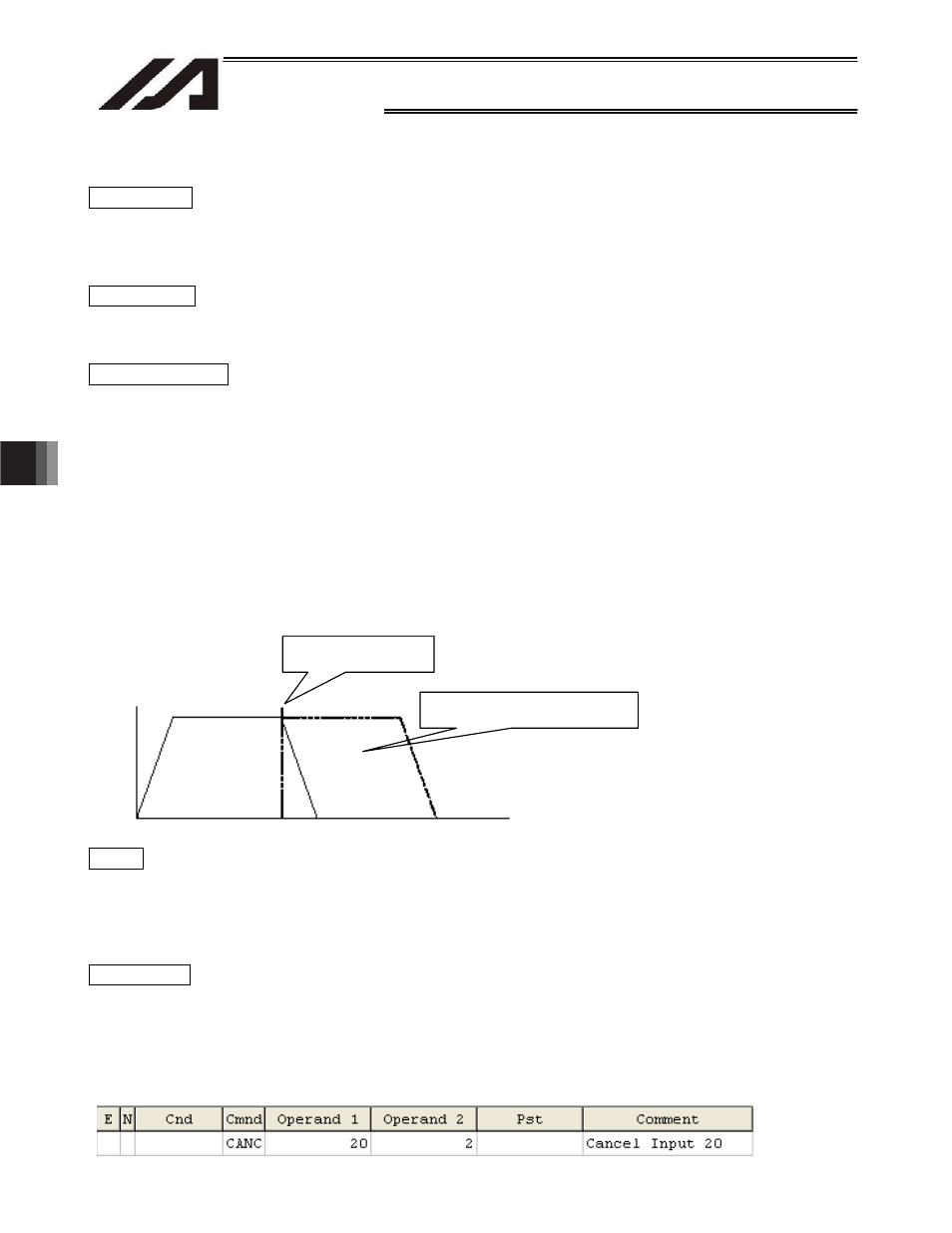
Abort movement commands when input port 20 turns ON. (Declaration)
Speed
o
Remaining
operation
Time
o
This operation is cancelled.
Input port 20 ON