IAI America TT-C3 User Manual
Page 175
165
INTELLIGENT ACTUATOR
Chapter 4 Commands
2.
Explanation
of
Commands
z CHVL (Change speed)
Command, declaration
Extension condition
(LD, A, O, AB, OB)
Input condition
(I/O, flag)
Command,
declaration
Operand 1
Operand 2
Output
(Output, flag)
Optional Optional
CHVL
Axis
pattern
Speed CP
[Function]
Change the speed of the axes operating in other task.
When a CHVL command is executed, the speed of the axes specified in operand 1 will change to the
value specified in operand 2.
(Note 1)
This command is not valid on an axis operated by a CIR, ARC, PSPL, PUSH, ARCH, PACH, CIRS or
ARCS command.
(Note 2)
Executing a CHVL command for an axis operating in sigmoid motion (SCRV command) will generate an
“Error No. CC1, Speed-change condition error.”
(Note 3)
This is a temporary speed-change command issued from other task to the active packet (point). It is not
affected by the data declared by VEL.
The axis pattern can be specified indirectly using a variable.
When program 1 is rephrased based on indirect specification using a variable:
111 (binary)
o 7 (decimal)
LET
1
7
Assign 7 to variable 1.
CHVL *1 100
(Note 4)
Since this command is valid only for the packet that is active at the time of execution of the command for
an axis subject to continuous motion in a PATH command, etc., caution must be exercised against the
timing shift. The packet handling will be put on hold during speed-change processing, so caution must
also be exercised against the locus shift.
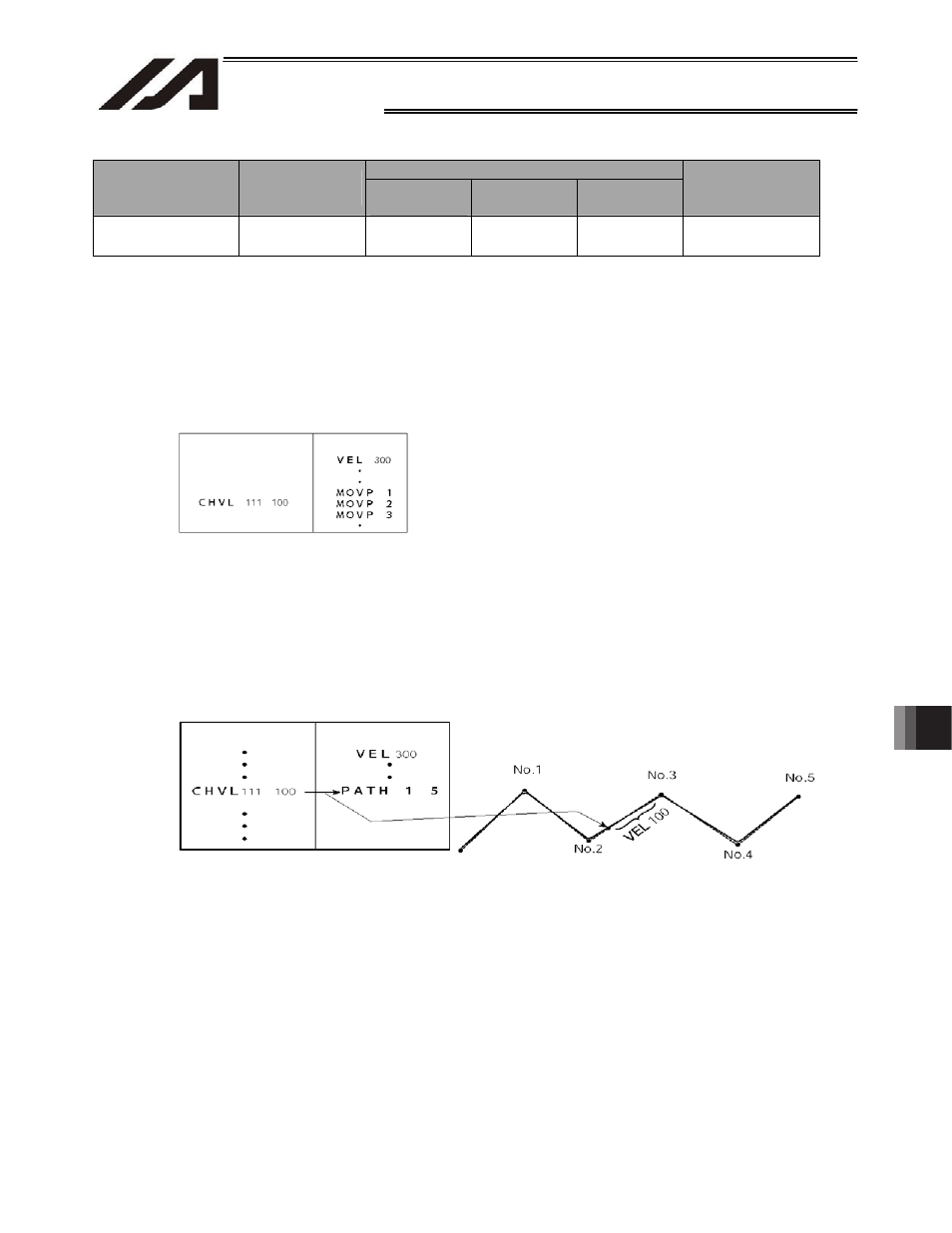
If CHVL is executed in program 1 while PATH is executed in program 2, or specifically during the PATH
movement from point No. 2 to point No. 3, the speed specified by CHVL (100 mm/sec in the above
example) will become valid only during the PATH movement to point No. 3. Other travel speeds will
remain at the speed specified by VEL (300 mm/sec in the above example).
(Note 5)
Override of the CHVL call task will be applied, so caution must be exercised.
(Note 6)
The maximum speed of the specified axis completing home return will be clamped by the minimum value
set in “Axis-specific parameter No. 28, Maximum operating speed of each axis” or “Axis-specific
parameter No. 27, Maximum speed limited by maximum motor speed” with respect to the specified axis
and related interpolation axes currently operating. To prevent the maximum speed from being limited due
to the effect of other axis whose maximum speed is lower than the speed specified in the CHVL
command, issue a CHVL command in multiple steps corresponding to the respective axes having
different maximum speeds. In particular, specification of a CHVL command in a separate step is
recommended for a rotating axis.
[Example] CHVL
1111
500
CHVL 111
500
CHVL 1000 500
If CHVL is executed in program 1 while MOVP 2
is executed in program 2, the travel speed of
MOVP 2 will become 100 mm/sec.
The speeds of other move commands will remain
300 mm/sec.
Program 1
Program 2
Program 1
Program 2