IAI America TT-C3 User Manual
Page 86
76
INTELLIGENT ACTUATOR
Chapter 4 Commands
1.
List
of
SEL
Language
Command
Codes
by
Function
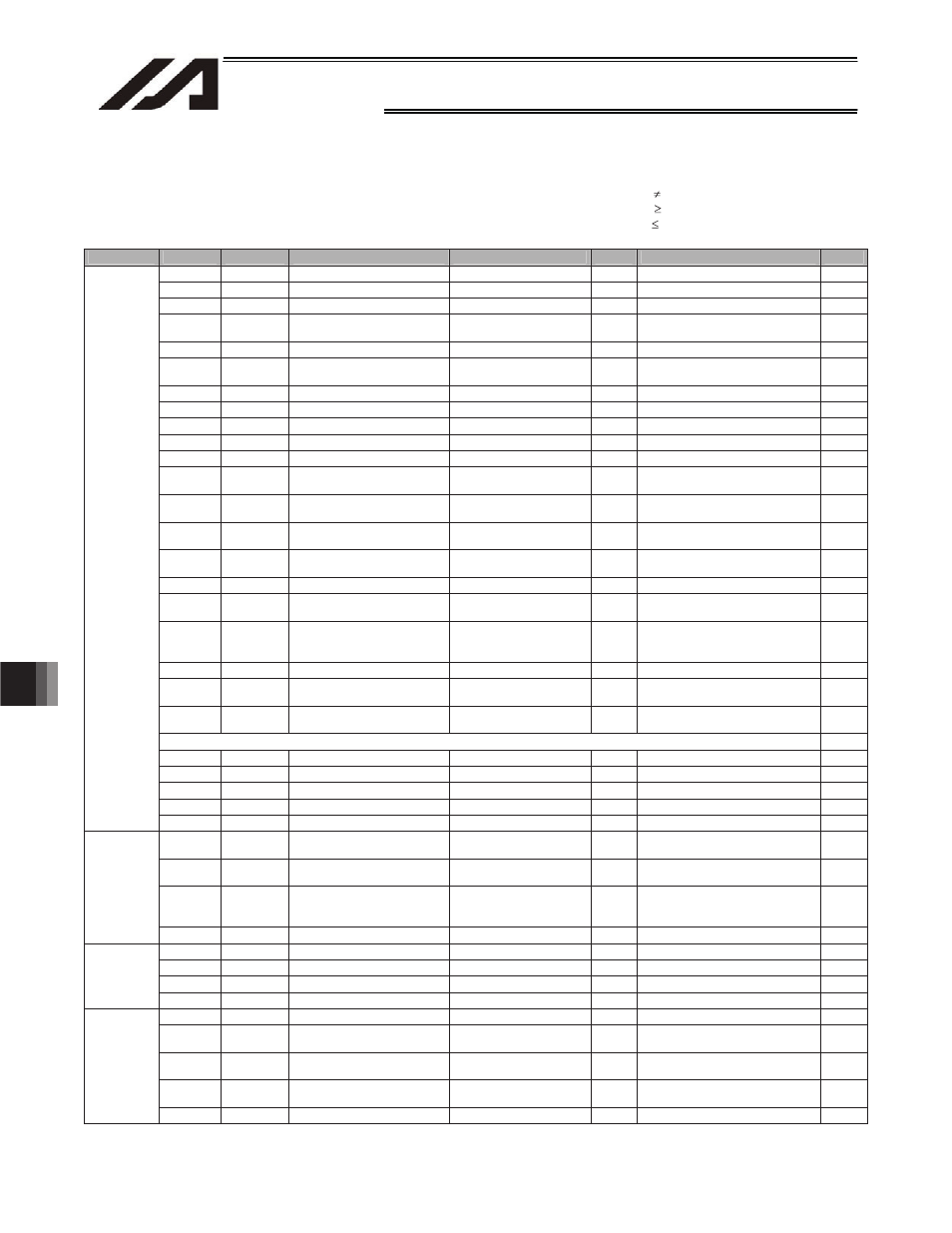
Operation type in the output field
CC: Command was executed successfully, ZR: Operation result is zero,
PE: Operation is complete, CP: Command part has passed, TU: Time up
EQ: Operand 1 = Operand 2, NE: Operand 1 Operand 2,
GT: Operand 1 > Operand 2, GE: Operand 1
Operand 2,
LT:
Operand 1 < Operand 2, LE: Operand 1 Operand 2
Category
Condition
Command
Operand 1
Operand 2
Output
Function
Page
Optional
SVXX
Operation axis pattern
Prohibited
PE
Servo [ON, OF]
149
Optional
HOME
Home-return axis pattern
Prohibited
PE
Return to home
150
Optional
MOVP
Destination position number
Prohibited
PE
Move to specified position
151
Optional
MOVL
Destination position number
Prohibited
PE
Move to specified position via
interpolation
152
Optional
MVPI
Travel position number
Prohibited
PE
Move to relative position
153
Optional
MVLI
Travel position number
Prohibited
PE
Move to relative position via
interpolation
154
Optional
PATH
Start position number
End position number
PE
Move along path
155
Optional
JXWX
Axis operation pattern
Start I/O, flag
PE
Jog [FN, FF, BN, BF]
156
Optional
STOP
Axis stop pattern
Prohibited
CP
Decelerate and stop axis
157
Optional
PSPL
Start position number
End position number
PE
Move along spline
158
Optional
PUSH
Target position number
Prohibited
PE
Move by push motion
159
Optional
CIR2
Passing position 1 number
Passing position 2
number
PE
Move along circle 2 (arc
interpolation)
161
Optional
ARC2
Passing position number
End position number
PE
Move along arc 2 (arc
interpolation)
162
Optional
CIRS
Passing position 1 number
Passing position 2
number
PE
Move three-dimensionally along
circle
163
Optional
ARCS
Passing position number
Passing position number
PE
Move three-dimensionally along
arc
164
166
Optional
CHVL
Axis pattern
Speed
CP
Change speed
165
Optional
ARCD
End position number
Center angle [deg]
PE
Move along arc via specification
of end position and center angl
Optional
ARCC
Center position number
Center angle [deg]
PE
Move along arc via specification
of center position and center
angle
167
Optional
PBND
Axis pattern
Distance
CP
Set positioning band
168
Optional
CIR
Passing position 1 number
Passing position 2
number
PE
Move along circle (CIR2 is
recommended)
169
Optional
ARC
Passing position number
End position number
PE
Move along arc (ARC2 is
recommended)
170
Refer to the page on palletizing for commands relating to arch motion.
Optional
ARCH
Position number
Position number
PE
Arch motion
220
Optional
ACHZ
Axis number
Prohibited
CP
Declare arch-motion Z-axis
210
Optional
ATRG
Position number
Position number
CP
Set arch trigger
211
Optional
AEXT
(Position number)
Prohibited
CP
Set arch-motion composition
212
Actuator
control
command
Optional
OFAZ
Offset value
Prohibited
CP
Set arch-motion Z-axis offset
212
Optional
IFXX
Comparison variable
Comparison value
CP
Compare [EQ, NE, GT, GE, LT,
LE]
171
Optional
ISXX
Column number
Column number,
character literal
CP
Compare strings
172
Prohibited
ELSE
Prohibited
Prohibited
CP
Declare execution destination
when IF command condition is
not satisfied
173
Structural IF
Prohibited
EDIF
Prohibited
Prohibited
CP
Declare end of IF
173
Optional
DWXX
Comparison variable
Comparison value
CP
Loop [EQ, NE, GT, GE, LT, LE]
174
Optional
LEAV
Prohibited
Prohibited
CP
Pull out from DO
174
Optional
ITER
Prohibited
Prohibited
CP
Repeat DO
175
Structural
DO
Prohibited
EDDO
Prohibited
Prohibited
CP
Declare end of DO
175
Optional
SLCT
Prohibited
Prohibited
CP
Declare start of multi-branching
176
Prohibited
WHXX
Comparison variable
Comparison value
CP
Branch value [EQ, NE, GT, GE,
LT, LE]
177
Prohibited
WSXX
Column number
Column number,
character literal
CP
Branch character string [EQ, NE]
178
179
Prohibited
OTHE
Prohibited
Prohibited
CP
Declare branching destination
when condition is not satisfied
Multi-
branching
Prohibited
EDSL
Prohibited
Prohibited
CP
Declare end of SLCT
179