IAI America TT-C3 User Manual
Page 163
153
INTELLIGENT ACTUATOR
Chapter 4 Commands
2.
Explanation
of
Commands
z MVPI (Move via incremental PTP)
Command, declaration
Extension condition
(LD, A, O, AB, OB)
Input condition
(I/O, flag)
Command,
declaration
Operand 1
Operand 2
Output
(Output, flag)
Optional Optional
MVPI
Position
number
Prohibited PE
[Function] Move the actuator, without interpolation, from the current position by the travel distance
corresponding to the position number specified in operand 1.
The output will turn OFF at the start of axis movement, and turn ON when the movement is
complete.
Movement may not occur if the specified travel distance is below the resolution (1 pulse):
1 pulse: Lead [mm] / 16384 --- Standard product with a gear ratio of 1:1
[Example 1]
VEL
100
Set the speed to 100 mm/sec.
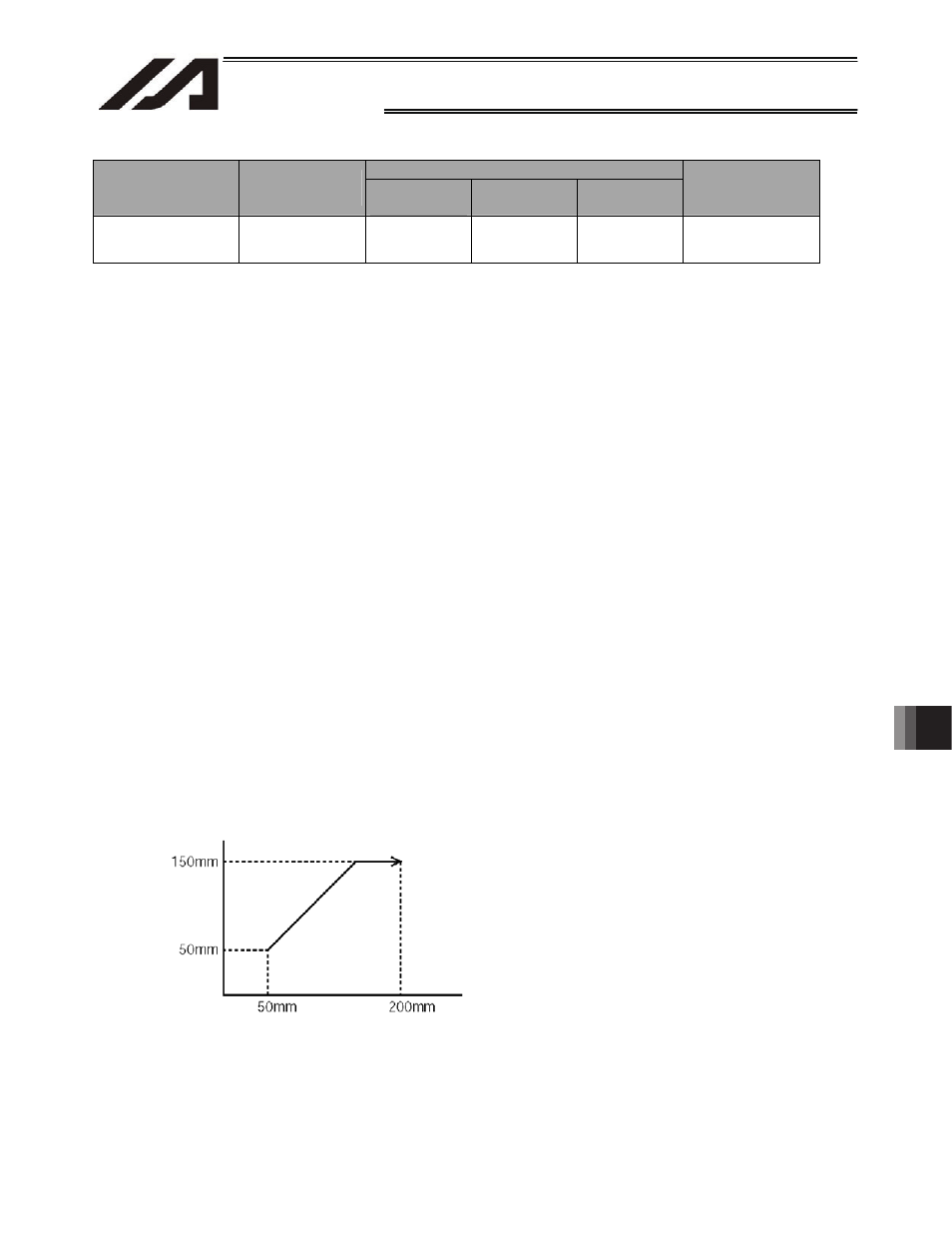
MVPI
1
If the current position is (50, 50) and position No. 1 is set to
(150, 100), the axes will move 150 in the X direction and 100
in the Y direction (200, 150) from the current position.
[Example 2]
VEL
100
Set the speed to 100 mm/sec.
LET
1
2
Assign 2 to variable 1.
MVPI
*1
Move from the current position by the travel distance
corresponding to the content of variable 1 (position No. 2, or
(100, 100)).
No. X-axis Y-axis Speed
Acceleration
Deceleration
1 150.000 100.000 XXX
XXXX
XXXX
2 100.000 100.000 XXX
XXXX
XXXX
Travel path from (50, 50) by the travel distance corresponding to position No. 1 (150, 100)
X-axis
Y-axis
Home 0
Only the Y-axis completes
movement.
Each axis moves at
the specified speed.