IAI America TT-C3 User Manual
Page 173
163
INTELLIGENT ACTUATOR
Chapter 4 Commands
2.
Explanation
of
Commands
z CIRS (Move three-dimensionally along circle)
Command, declaration
Extension condition
(LD, A, O, AB, OB)
Input condition
(I/O, flag)
Command,
declaration
Operand 1
Operand 2
Output
(Output, flag)
Optional Optional
CIRS
Passing
position 1
number
Passing
position 2
number
PE
This command is available with the PC software of version 1.1.0.5 or later and teaching pendant of version 1.05
or later.
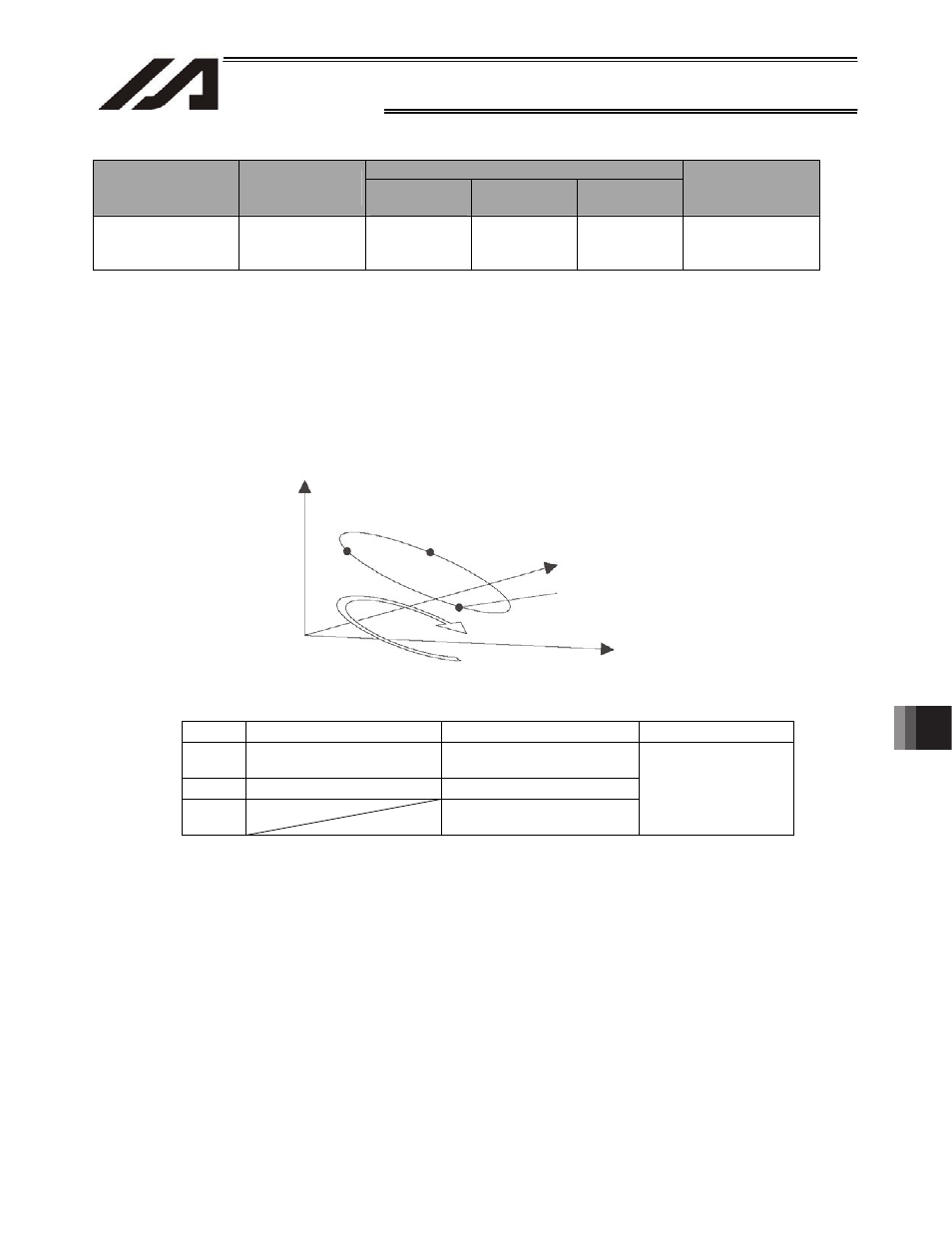
[Function] Move along a circle (three-dimensional movement) originating from the current position and
passing positions 1 and 2 sequentially.
The rotating direction of the circle is determined by the given position data.
The movement in the diagram below will be performed in the reverse direction if passing
positions 1 and 2 are reversed.
The speed and acceleration will take valid values based on the following priorities:
Priority
Speed
Acceleration Deceleration
1
Setting in the position data
specified in operand 1
Setting in the position data
specified in operand 1
2
Setting by VEL command
Setting by ACC command
3
Default acceleration in all-
axis parameter No. 11
Same as the valid
acceleration value
If speed is not set, a “C88 speed specification error” will generate.
If acceleration/deceleration is not valid, a “C89 acceleration/deceleration specification error” will
generate.
(Note 1)
This command is valid on arbitrary planes in a three-dimensional space. (Axis 2 (if there are
only two valid axes) or axis 3 may be selected automatically prior to axis 1 in accordance with
the position data.)
(Note 2)
The locus tends to shift inward as the speed increases. Minor adjustment, such as setting the
position data slightly outward, may be required.
(Note 3)
If the circle diameter is small with respect to the set speed, the speed may be limited.
(Increasing the acceleration/deceleration will reduce the speed limitation, but they must not
exceed the range permitted by the actuator.)
Axis 3
Axis 2
Axis 1
Passing position 1
Position origin
Passing position 2