Melsec-q, Appendices – MITSUBISHI ELECTRIC Mitsubishi Programmable Logic Controller QD75D User Manual
Page 741
Appendix - 99
MELSEC-Q
APPENDICES
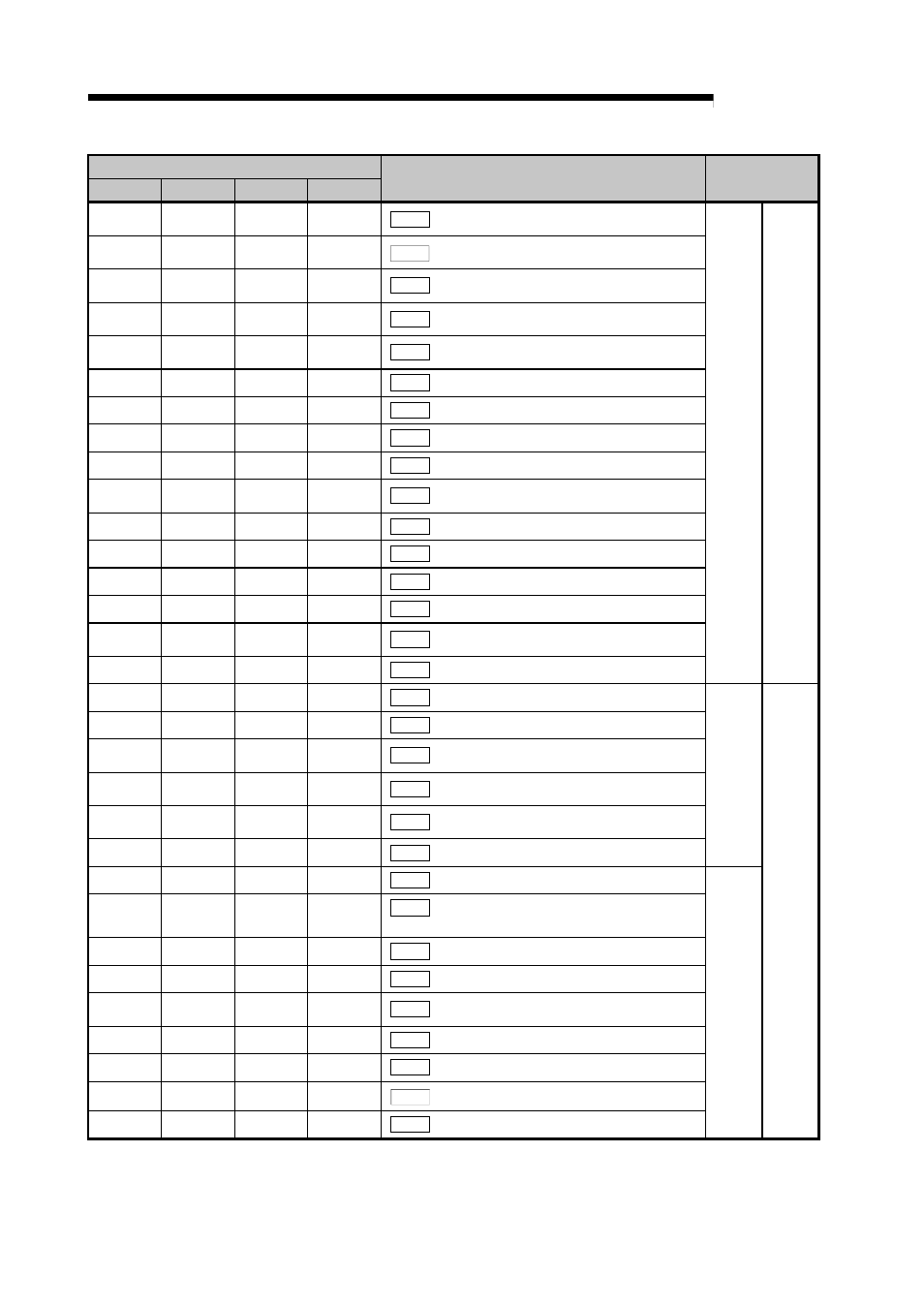
Buffer memory address
Axis 1
Axis 2
Axis 3
Axis 4
Item
Memory area
40
41
190
191
340
341
490
491
Pr.27
Acceleration time 3
42
43
192
193
342
343
492
493
Pr.28
Deceleration time 1
44
45
194
195
344
345
494
495
Pr.29
Deceleration time 2
46
47
196
197
346
347
496
497
Pr.30
Deceleration time 3
48
49
198
199
348
349
498
499
Pr.31
JOG speed limit value
50
200
350
500
Pr.32
JOG operation acceleration time selection
51
201
351
501
Pr.33
JOG operation deceleration time selection
52
202
352
502
Pr.34
Acceleration/deceleration process selection
53
203
353
503
Pr.35
S-pattern proportion
54
55
204
205
354
355
504
505
Pr.36
Sudden stop deceleration time
56
206
356
506
Pr.37
Stop group 1 sudden stop selection
57
207
357
507
Pr.38
Stop group 2 sudden stop selection
58
208
358
508
Pr.39
Stop group 3 sudden stop selection
59
209
359
509
Pr.40
Positioning complete signal output time
60
61
210
211
360
361
510
511
Pr.41
Allowable circular interpolation error width
62
212
362
512
Pr.42
External command function selection
Basic paramet
ers 2
Positioning para
m
eters
70
220
370
520
Pr.43
OPR method
71
221
371
521
Pr.44
OPR direction
72
73
222
223
372
373
522
523
Pr.45
OP address
74
75
224
225
374
375
524
525
Pr.46
OPR speed
76
77
226
227
376
377
526
527
Pr.47
Creep speed
78
228
378
528
Pr.48
OPR retry
O
P
R
basic parameters
79
229
379
529
Pr.49
OPR dwell time
80
81
230
231
380
381
530
531
Pr.50
Setting for the movement amount after
near-point dog ON
82
232
382
532
Pr.51
OPR acceleration time selection
83
233
383
533
Pr.52
OPR deceleration time selection
84
85
234
235
384
385
534
535
Pr.53
OP shift amount
86
236
386
536
Pr.54
OPR torque limit value
87
237
387
537
Pr.55
Deviation counter clear signal output time
88
238
388
538
Pr.56
Speed designation during OP shift
89
239
389
539
Pr.57
Dwell time during OPR retry
O
P
R
detailed parameters
O
P
R
parameters